 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Generation of Scenarios for System-level Simulation-based Verification of Autonomous Driving Systems
Nov 16, 2023

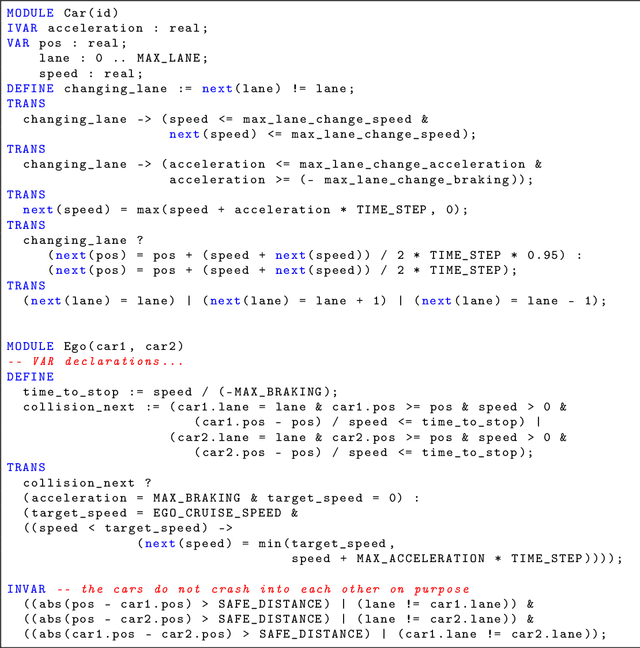
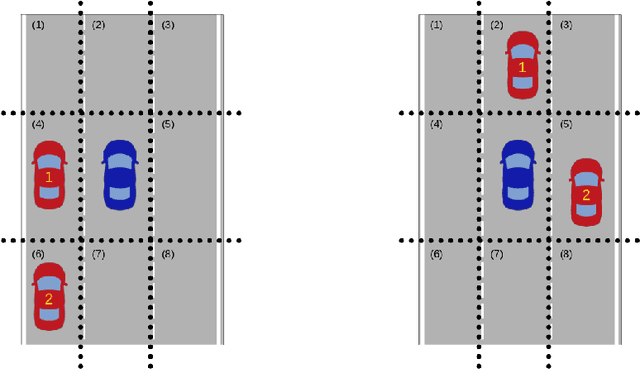
With increasing complexity of Automated Driving Systems (ADS), ensuring their safety and reliability has become a critical challenge. The Verification and Validation (V&V) of these systems are particularly demanding when AI components are employed to implement perception and/or control functions. In ESA-funded project VIVAS, we developed a generic framework for system-level simulation-based V&V of autonomous systems. The approach is based on a simulation model of the system, an abstract model that describes symbolically the system behavior, and formal methods to generate scenarios and verify the simulation executions. Various coverage criteria can be defined to guide the automated generation of the scenarios. In this paper, we describe the instantiation of the VIVAS framework for an ADS case study. This is based on the integration of CARLA, a widely-used driving simulator, and its ScenarioRunner tool, which enables the creation of diverse and complex driving scenarios. This is also used in the CARLA Autonomous Driving Challenge to validate different ADS agents for perception and control based on AI, shared by the CARLA community. We describe the development of an abstract ADS model and the formulation of a coverage criterion that focuses on the behaviors of vehicles relative to the vehicle with ADS under verification. Leveraging the VIVAS framework, we generate and execute various driving scenarios, thus testing the capabilities of the AI components. The results show the effectiveness of VIVAS in automatically generating scenarios for system-level simulation-based V&V of an automated driving system using CARLA and ScenarioRunner. Therefore, they highlight the potential of the approach as a powerful tool in the future of ADS V&V methodologies.
* In Proceedings FMAS 2023, arXiv:2311.08987