 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Generation of Scenarios for System-level Simulation-based Verification of Autonomous Driving Systems
Nov 16, 2023

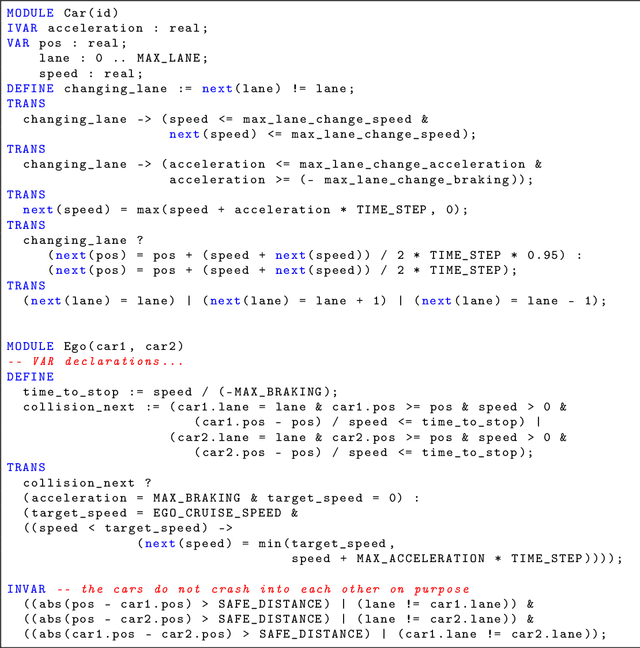
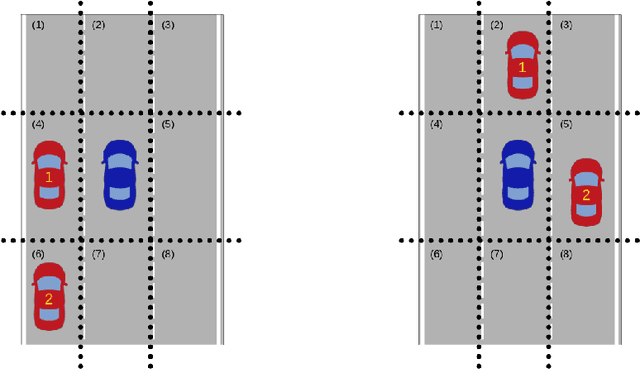
With increasing complexity of Automated Driving Systems (ADS), ensuring their safety and reliability has become a critical challenge. The Verification and Validation (V&V) of these systems are particularly demanding when AI components are employed to implement perception and/or control functions. In ESA-funded project VIVAS, we developed a generic framework for system-level simulation-based V&V of autonomous systems. The approach is based on a simulation model of the system, an abstract model that describes symbolically the system behavior, and formal methods to generate scenarios and verify the simulation executions. Various coverage criteria can be defined to guide the automated generation of the scenarios. In this paper, we describe the instantiation of the VIVAS framework for an ADS case study. This is based on the integration of CARLA, a widely-used driving simulator, and its ScenarioRunner tool, which enables the creation of diverse and complex driving scenarios. This is also used in the CARLA Autonomous Driving Challenge to validate different ADS agents for perception and control based on AI, shared by the CARLA community. We describe the development of an abstract ADS model and the formulation of a coverage criterion that focuses on the behaviors of vehicles relative to the vehicle with ADS under verification. Leveraging the VIVAS framework, we generate and execute various driving scenarios, thus testing the capabilities of the AI components. The results show the effectiveness of VIVAS in automatically generating scenarios for system-level simulation-based V&V of an automated driving system using CARLA and ScenarioRunner. Therefore, they highlight the potential of the approach as a powerful tool in the future of ADS V&V methodologies.
* In Proceedings FMAS 2023, arXiv:2311.08987
Computing Small Unsatisfiable Cores in Satisfiability Modulo Theories
Jan 16, 2014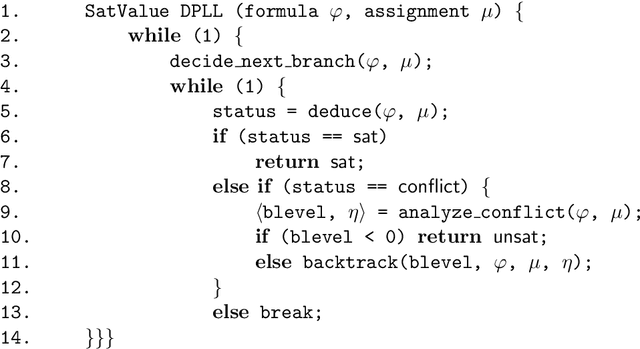
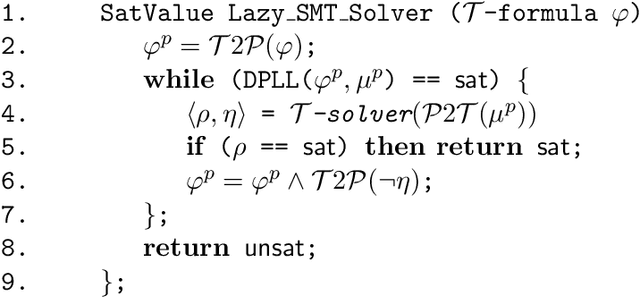
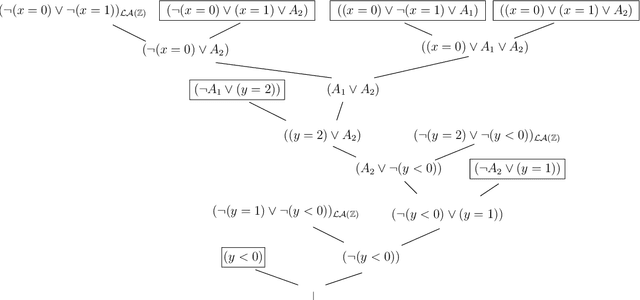
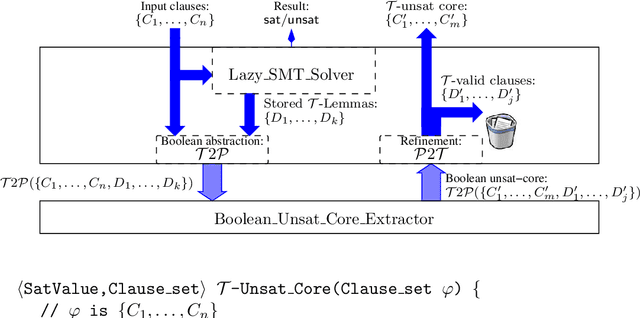
The problem of finding small unsatisfiable cores for SAT formulas has recently received a lot of interest, mostly for its applications in formal verification. However, propositional logic is often not expressive enough for representing many interesting verification problems, which can be more naturally addressed in the framework of Satisfiability Modulo Theories, SMT. Surprisingly, the problem of finding unsatisfiable cores in SMT has received very little attention in the literature. In this paper we present a novel approach to this problem, called the Lemma-Lifting approach. The main idea is to combine an SMT solver with an external propositional core extractor. The SMT solver produces the theory lemmas found during the search, dynamically lifting the suitable amount of theory information to the Boolean level. The core extractor is then called on the Boolean abstraction of the original SMT problem and of the theory lemmas. This results in an unsatisfiable core for the original SMT problem, once the remaining theory lemmas are removed. The approach is conceptually interesting, and has several advantages in practice. In fact, it is extremely simple to implement and to update, and it can be interfaced with every propositional core extractor in a plug-and-play manner, so as to benefit for free of all unsat-core reduction techniques which have been or will be made available. We have evaluated our algorithm with a very extensive empirical test on SMT-LIB benchmarks, which confirms the validity and potential of this approach.