 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Build: Autonomous Robotic Assembly of Stable Structures Without Predefined Plans
Feb 27, 2026This paper presents a novel autonomous robotic assembly framework for constructing stable structures without relying on predefined architectural blueprints. Instead of following fixed plans, construction tasks are defined through targets and obstacles, allowing the system to adapt more flexibly to environmental uncertainty and variations during the building process. A reinforcement learning (RL) policy, trained using deep Q-learning with successor features, serves as the decision-making component. As a proof of concept, we evaluate the approach on a benchmark of 15 2D robotic assembly tasks of discrete block construction. Experiments using a real-world closed-loop robotic setup demonstrate the feasibility of the method and its ability to handle construction noise. The results suggest that our framework offers a promising direction for more adaptable and robust robotic construction in real-world environments.
Robotic additive construction of bar structures: Unified sequence and motion planning
May 24, 2021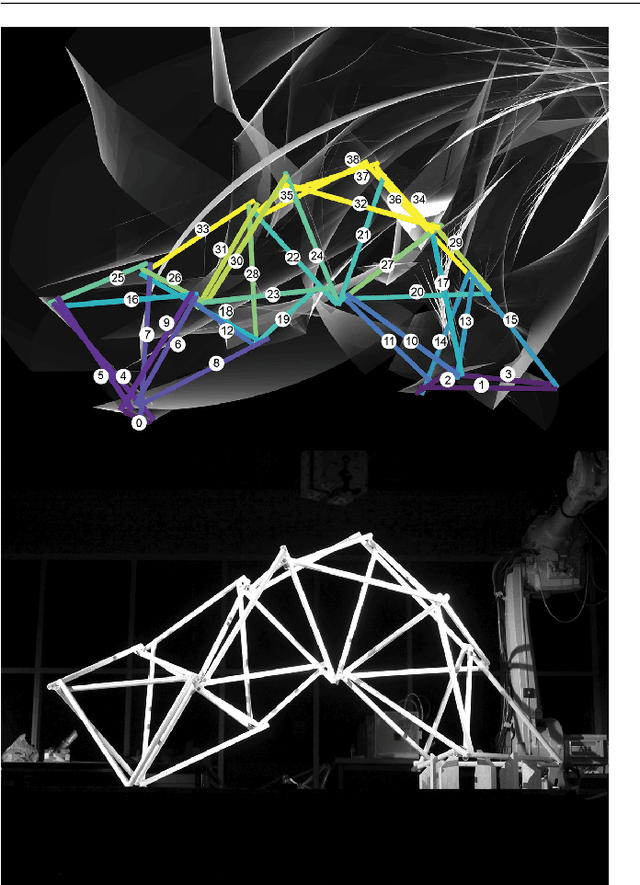
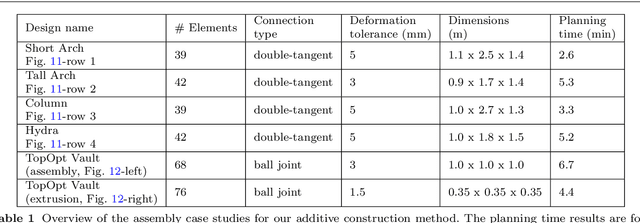
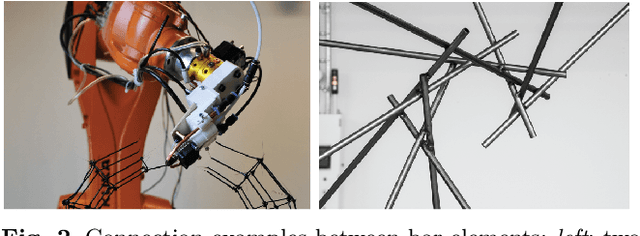
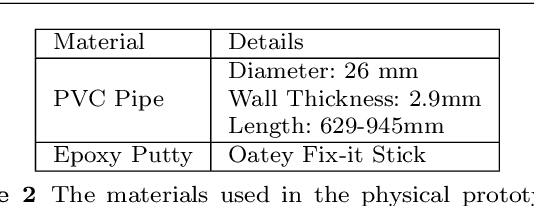
Additive robotic construction of building-scale discrete bar structures, such as trusses and space frames, is increasingly attractive due to the potential improvements in efficiency, safety, and design possibilities. However, programming complex robots, such as manipulators with seven degrees of freedom, to successfully complete construction tasks can be tedious, challenging, or impossible for a human to do manually. Namely, the structure must be constructed in a sequence that preserves structural properties, such as stiffness, at each step. At the same time, this sequence must allow for the robot to precisely manipulate elements within the in-progress structure while respecting geometric constraints that, for example, ensure the robot does not collide with what it has built. In this work, we present an automated and newly generalized planning approach for jointly finding a construction sequence and robot motion plan for additive construction that satisfies these requirements. Our approach can be applied in a variety of additive construction processes, and we demonstrate it specifically on spatial extrusion and discrete bar assembly in this paper. We demonstrate the effectiveness of our approach on several simulated and real-world extrusion and assembly tasks, including a human-scale physical prototype, for which our algorithm is deployed for the first time to plan the assembly of a complicated double tangent bar system design.
Three Cooperative Robotic Fabrication Methods for the Scaffold-Free Construction of a Masonry Arch
Apr 10, 2021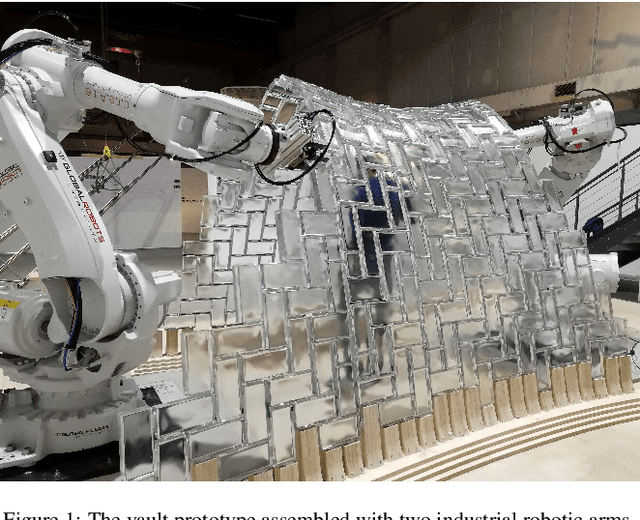
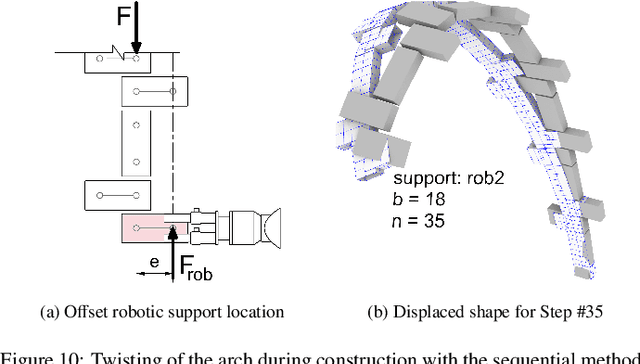
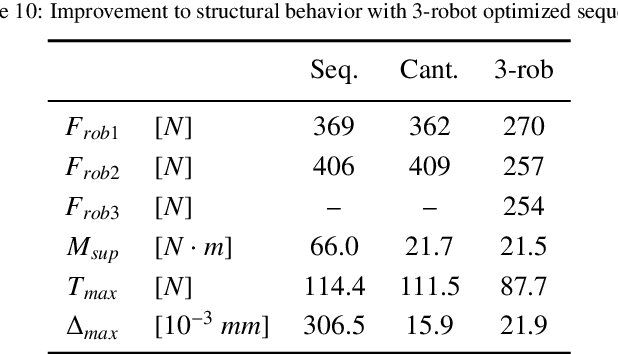
Geometrically complex masonry structures (e.g., arches, domes, vaults) are traditionally built with expensive scaffolding or falsework to provide stability during construction. The process of building such structures can potentially be improved through the use of multiple robots working together in a cooperative assembly framework. Here a robot is envisioned as both a placement and external support agent during fabrication - the unfinished structure is supported in such a way that scaffolding is not required. The goal of this paper is to present and validate the efficacy of three cooperative fabrication approaches using two or three robots, for the scaffold-free construction of a stable masonry arch from which a medium-span vault is built. A simplified numerical method to represent a masonry structure is first presented and validated to analyse systems composed of discrete volumetric elements. This method is then used to evaluate the effect of the three cooperative robotic fabrication strategies on the stability performance of the central arch. The sequential method and cantilever method, which utilize two robotic arms, are shown to be viable methods, but have challenges related to scalability and robustness. By adding a third robotic agent, it becomes possible to determine a structurally optimal fabrication sequence through a multi-objective optimization process. The optimized three robot method is shown to significantly improve the structural behavior over all fabrication steps. The modeling approaches presented in this paper are broadly formulated and widely applicable for the analysis of cooperative robotic fabrication sequences for the construction of discrete element structures across scales and materials.