 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic additive construction of bar structures: Unified sequence and motion planning
May 24, 2021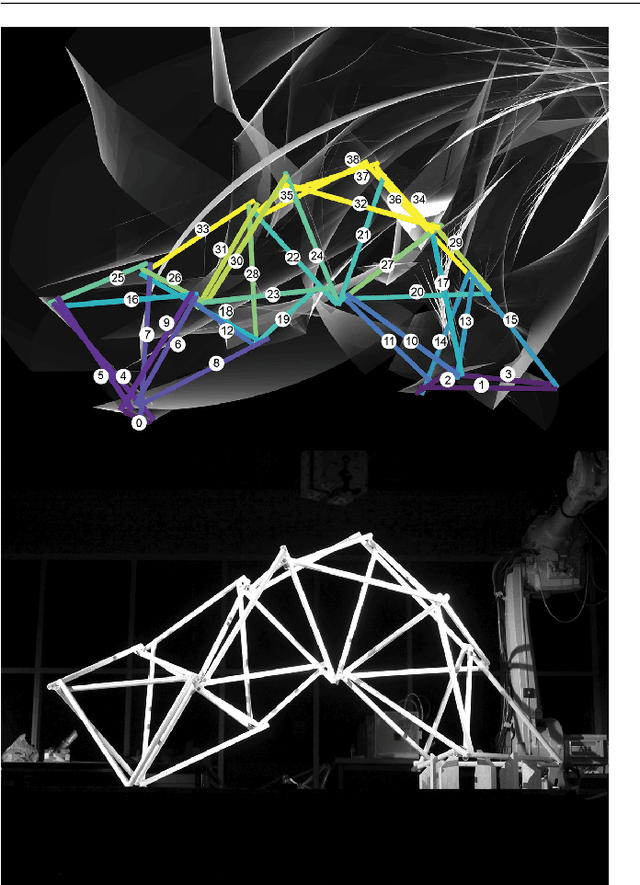
Additive robotic construction of building-scale discrete bar structures, such as trusses and space frames, is increasingly attractive due to the potential improvements in efficiency, safety, and design possibilities. However, programming complex robots, such as manipulators with seven degrees of freedom, to successfully complete construction tasks can be tedious, challenging, or impossible for a human to do manually. Namely, the structure must be constructed in a sequence that preserves structural properties, such as stiffness, at each step. At the same time, this sequence must allow for the robot to precisely manipulate elements within the in-progress structure while respecting geometric constraints that, for example, ensure the robot does not collide with what it has built. In this work, we present an automated and newly generalized planning approach for jointly finding a construction sequence and robot motion plan for additive construction that satisfies these requirements. Our approach can be applied in a variety of additive construction processes, and we demonstrate it specifically on spatial extrusion and discrete bar assembly in this paper. We demonstrate the effectiveness of our approach on several simulated and real-world extrusion and assembly tasks, including a human-scale physical prototype, for which our algorithm is deployed for the first time to plan the assembly of a complicated double tangent bar system design.