 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparison of Various Approaches to Reinforcement Learning Algorithms for Multi-robot Box Pushing
Sep 21, 2018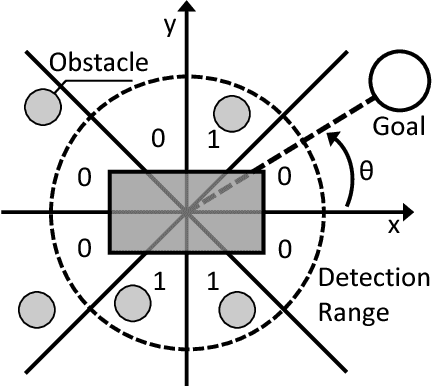
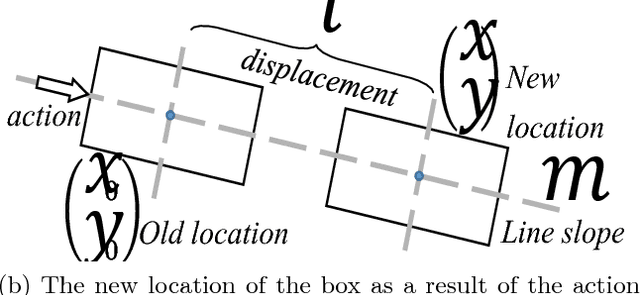
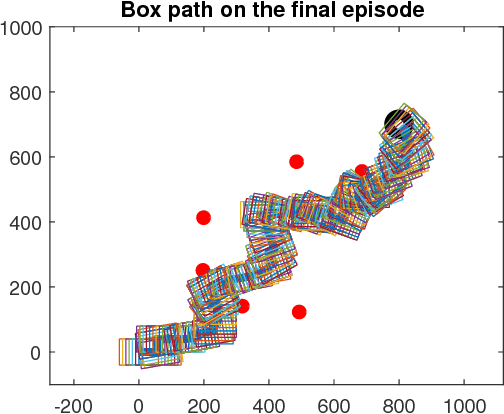
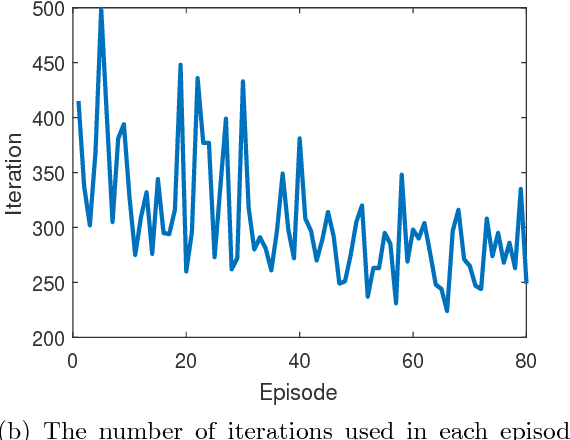
In this paper, a comparison of reinforcement learning algorithms and their performance on a robot box pushing task is provided. The robot box pushing problem is structured as both a single-agent problem and also a multi-agent problem. A Q-learning algorithm is applied to the single-agent box pushing problem, and three different Q-learning algorithms are applied to the multi-agent box pushing problem. Both sets of algorithms are applied on a dynamic environment that is comprised of static objects, a static goal location, a dynamic box location, and dynamic agent positions. A simulation environment is developed to test the four algorithms, and their performance is compared through graphical explanations of test results. The comparison shows that the newly applied reinforcement algorithm out-performs the previously applied algorithms on the robot box pushing problem in a dynamic environment.
Autonomous Robotic System using Non-Destructive Evaluation methods for Bridge Deck Inspection
Apr 15, 2017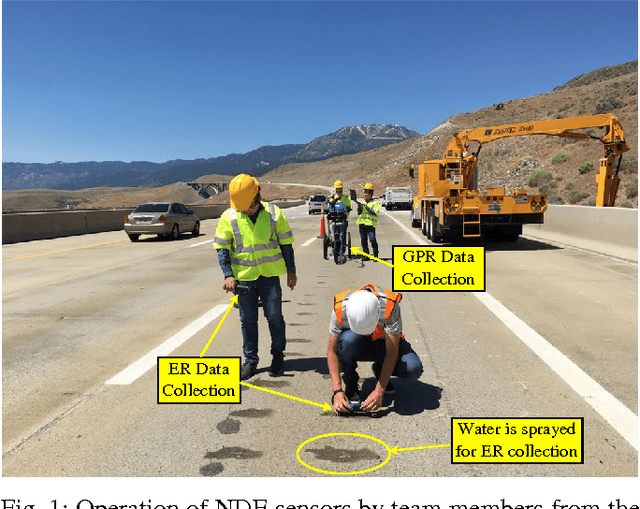
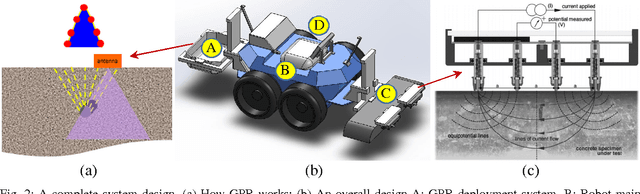
Bridge condition assessment is important to maintain the quality of highway roads for public transport. Bridge deterioration with time is inevitable due to aging material, environmental wear and in some cases, inadequate maintenance. Non-destructive evaluation (NDE) methods are preferred for condition assessment for bridges, concrete buildings, and other civil structures. Some examples of NDE methods are ground penetrating radar (GPR), acoustic emission, and electrical resistivity (ER). NDE methods provide the ability to inspect a structure without causing any damage to the structure in the process. In addition, NDE methods typically cost less than other methods, since they do not require inspection sites to be evacuated prior to inspection, which greatly reduces the cost of safety related issues during the inspection process. In this paper, an autonomous robotic system equipped with three different NDE sensors is presented. The system employs GPR, ER, and a camera for data collection. The system is capable of performing real-time, cost-effective bridge deck inspection, and is comprised of a mechanical robot design and machine learning and pattern recognition methods for automated steel rebar picking to provide realtime condition maps of the corrosive deck environments.