 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparison of Various Approaches to Reinforcement Learning Algorithms for Multi-robot Box Pushing
Paper and Code
Sep 21, 2018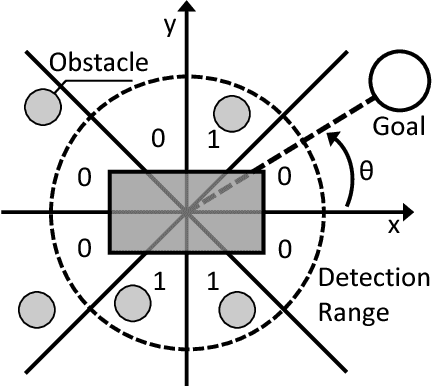
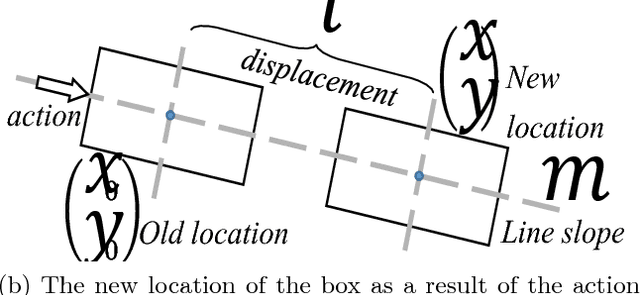
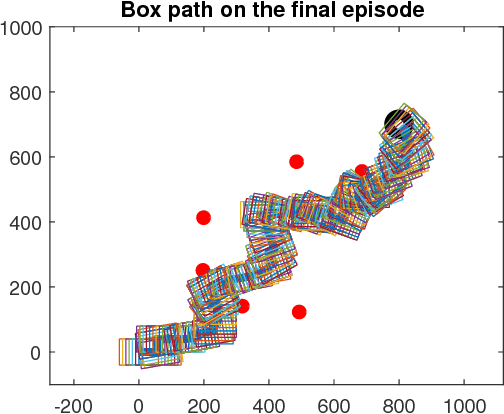
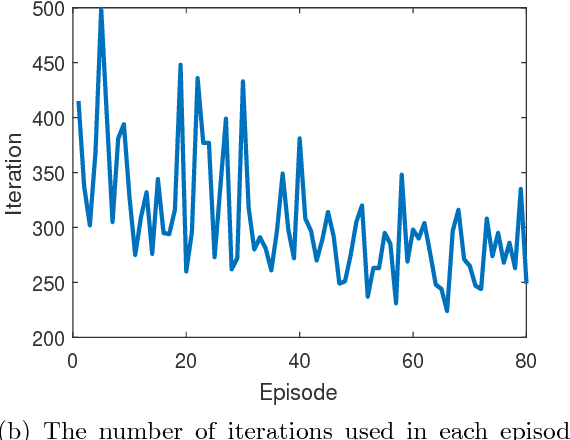
In this paper, a comparison of reinforcement learning algorithms and their performance on a robot box pushing task is provided. The robot box pushing problem is structured as both a single-agent problem and also a multi-agent problem. A Q-learning algorithm is applied to the single-agent box pushing problem, and three different Q-learning algorithms are applied to the multi-agent box pushing problem. Both sets of algorithms are applied on a dynamic environment that is comprised of static objects, a static goal location, a dynamic box location, and dynamic agent positions. A simulation environment is developed to test the four algorithms, and their performance is compared through graphical explanations of test results. The comparison shows that the newly applied reinforcement algorithm out-performs the previously applied algorithms on the robot box pushing problem in a dynamic environment.