 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Map Density Selection for Locally-Performant Visual Place Recognition
Feb 25, 2026A key challenge in translating Visual Place Recognition (VPR) from the lab to long-term deployment is ensuring a priori that a system can meet user-specified performance requirements across different parts of an environment, rather than just on average globally. A critical mechanism for controlling local VPR performance is the density of the reference mapping database, yet this factor is largely neglected in existing work, where benchmark datasets with fixed, engineering-driven (sensors, storage, GPS frequency) sampling densities are typically used. In this paper, we propose a dynamic VPR mapping approach that uses pairs of reference traverses from the target environment to automatically select an appropriate map density to satisfy two user-defined requirements: (1) a target Local Recall@1 level, and (2) the proportion of the operational environment over which this requirement must be met or exceeded, which we term the Recall Achievement Rate (RAR). Our approach is based on the hypothesis that match patterns between multiple reference traverses, evaluated across different map densities, can be modelled to predict the density required to meet these performance targets on unseen deployment data. Through extensive experiments across multiple VPR methods and the Nordland and Oxford RobotCar benchmarks, we show that our system consistently achieves or exceeds the specified local recall level over at least the user-specified proportion of the environment. Comparisons with alternative baselines demonstrate that our approach reliably selects the correct operating point in map density, avoiding unnecessary over-densification. Finally, ablation studies and analysis evaluate sensitivity to reference map choice and local space definitions, and reveal that conventional global Recall@1 is a poor predictor of the often more operationally meaningful RAR metric.
Improving Visual Place Recognition with Sequence-Matching Receptiveness Prediction
Mar 10, 2025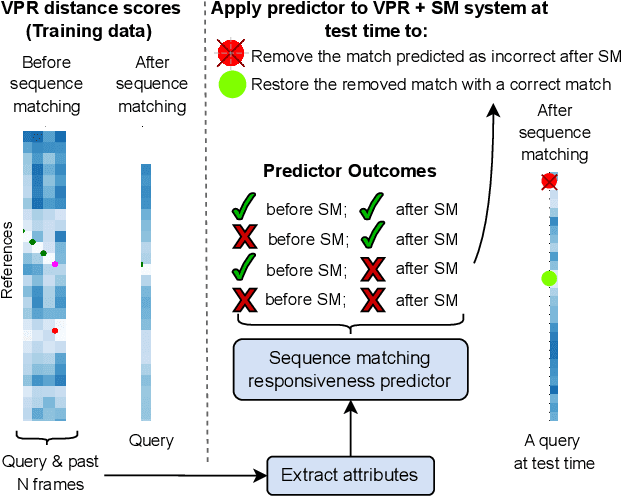
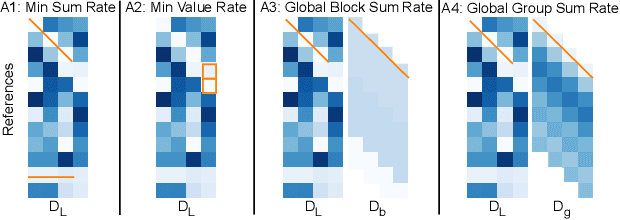
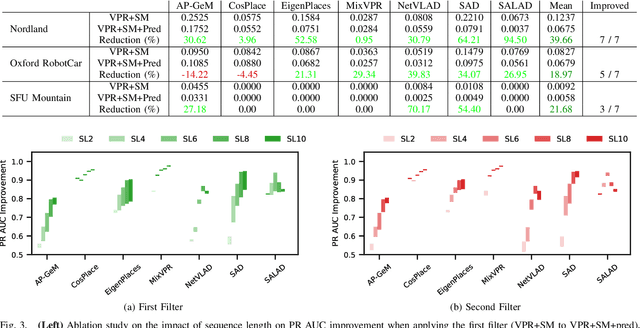
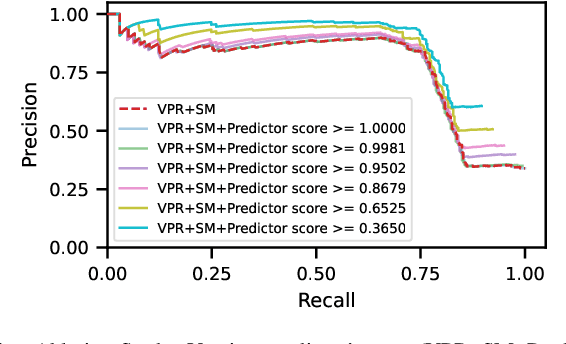
In visual place recognition (VPR), filtering and sequence-based matching approaches can improve performance by integrating temporal information across image sequences, especially in challenging conditions. While these methods are commonly applied, their effects on system behavior can be unpredictable and can actually make performance worse in certain situations. In this work, we present a new supervised learning approach that learns to predict the per-frame sequence matching receptiveness (SMR) of VPR techniques, enabling the system to selectively decide when to trust the output of a sequence matching system. The approach is agnostic to the underlying VPR technique. Our approach predicts SMR-and hence significantly improves VPR performance-across a large range of state-of-the-art and classical VPR techniques (namely CosPlace, MixVPR, EigenPlaces, SALAD, AP-GeM, NetVLAD and SAD), and across three benchmark VPR datasets (Nordland, Oxford RobotCar, and SFU-Mountain). We also provide insights into a complementary approach that uses the predictor to replace discarded matches, as well as ablation studies, including an analysis of the interactions between our SMR predictor and the selected sequence length. We will release our code upon acceptance.
A Hyperdimensional One Place Signature to Represent Them All: Stackable Descriptors For Visual Place Recognition
Dec 09, 2024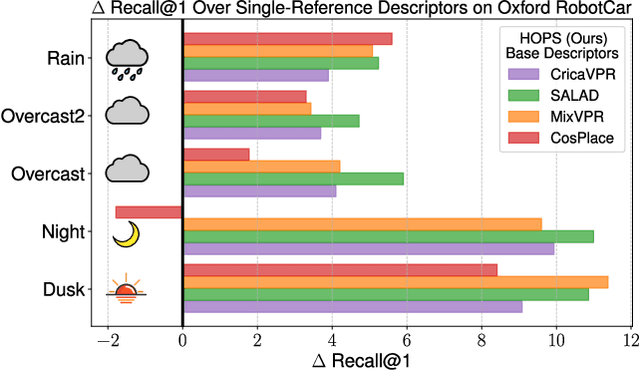
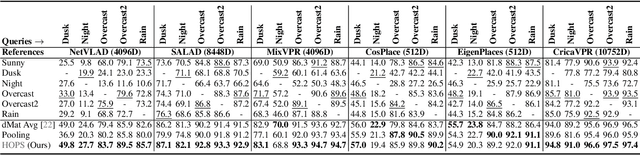
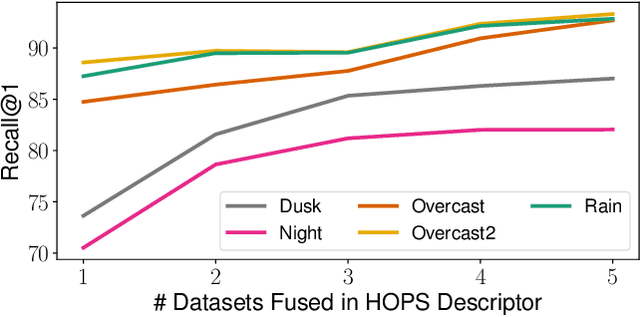
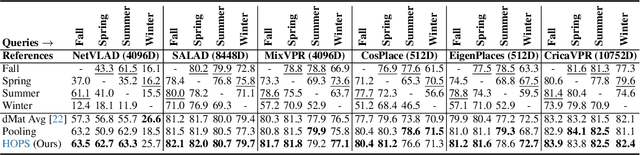
Visual Place Recognition (VPR) enables coarse localization by comparing query images to a reference database of geo-tagged images. Recent breakthroughs in deep learning architectures and training regimes have led to methods with improved robustness to factors like environment appearance change, but with the downside that the required training and/or matching compute scales with the number of distinct environmental conditions encountered. Here, we propose Hyperdimensional One Place Signatures (HOPS) to simultaneously improve the performance, compute and scalability of these state-of-the-art approaches by fusing the descriptors from multiple reference sets captured under different conditions. HOPS scales to any number of environmental conditions by leveraging the Hyperdimensional Computing framework. Extensive evaluations demonstrate that our approach is highly generalizable and consistently improves recall performance across all evaluated VPR methods and datasets by large margins. Arbitrarily fusing reference images without compute penalty enables numerous other useful possibilities, three of which we demonstrate here: descriptor dimensionality reduction with no performance penalty, stacking synthetic images, and coarse localization to an entire traverse or environmental section.
Applications of Spiking Neural Networks in Visual Place Recognition
Nov 22, 2023In robotics, Spiking Neural Networks (SNNs) are increasingly recognized for their largely-unrealized potential energy efficiency and low latency particularly when implemented on neuromorphic hardware. Our paper highlights three advancements for SNNs in Visual Place Recognition (VPR). First, we propose Modular SNNs, where each SNN represents a set of non-overlapping geographically distinct places, enabling scalable networks for large environments. Secondly, we present Ensembles of Modular SNNs, where multiple networks represent the same place, significantly enhancing accuracy compared to single-network models. Our SNNs are compact and small, comprising only 1500 neurons and 474k synapses, which makes them ideally suited for ensembling due to this small size. Lastly, we investigate the role of sequence matching in SNN-based VPR, a technique where consecutive images are used to refine place recognition. We analyze the responsiveness of SNNs to ensembling and sequence matching compared to other VPR techniques. Our contributions highlight the viability of SNNs for VPR, offering scalable and robust solutions, paving the way for their application in various energy-sensitive robotic tasks.
Ensembles of Compact, Region-specific & Regularized Spiking Neural Networks for Scalable Place Recognition
Sep 19, 2022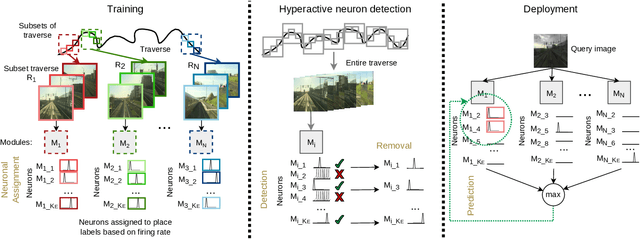
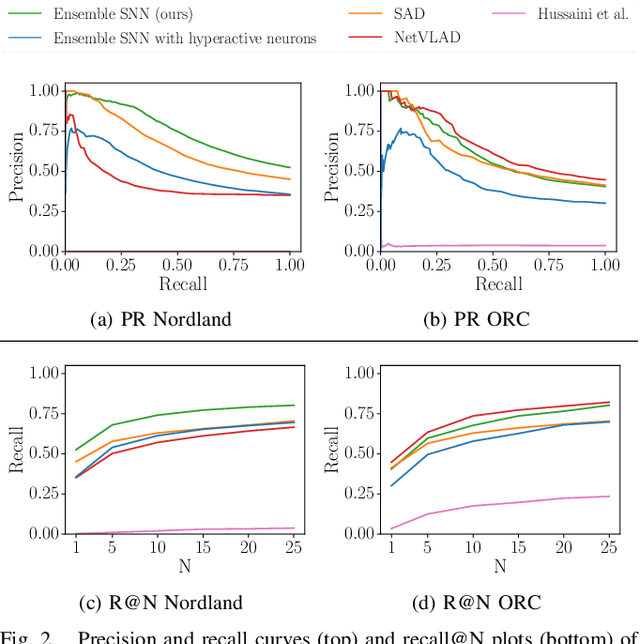
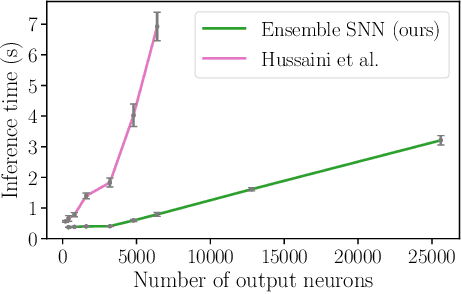
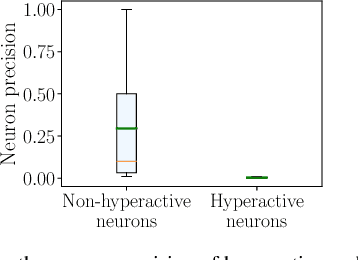
Spiking neural networks have significant potential utility in robotics due to their high energy efficiency on specialized hardware, but proof-of-concept implementations have not yet typically achieved competitive performance or capability with conventional approaches. In this paper, we tackle one of the key practical challenges of scalability by introducing a novel modular ensemble network approach, where compact, localized spiking networks each learn and are solely responsible for recognizing places in a local region of the environment only. This modular approach creates a highly scalable system. However, it comes with a high-performance cost where a lack of global regularization at deployment time leads to hyperactive neurons that erroneously respond to places outside their learned region. Our second contribution introduces a regularization approach that detects and removes these problematic hyperactive neurons during the initial environmental learning phase. We evaluate this new scalable modular system on benchmark localization datasets Nordland and Oxford RobotCar, with comparisons to both standard techniques NetVLAD and SAD, and a previous spiking neural network system. Our system substantially outperforms the previous SNN system on its small dataset, but also maintains performance on 27 times larger benchmark datasets where the operation of the previous system is computationally infeasible, and performs competitively with the conventional localization systems.
Spiking Neural Networks for Visual Place Recognition via Weighted Neuronal Assignments
Sep 14, 2021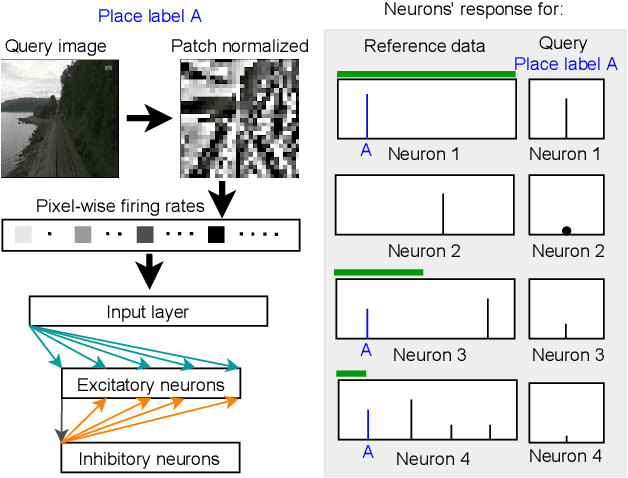
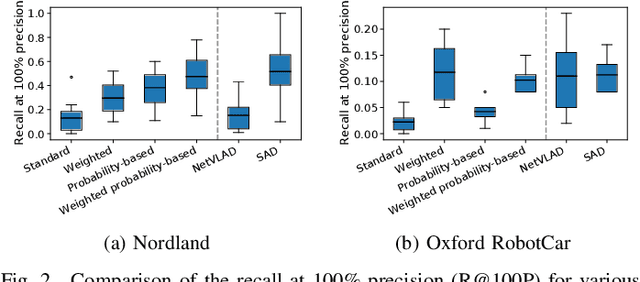
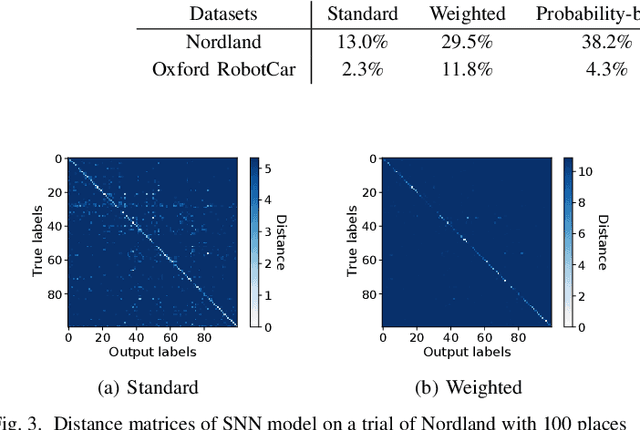
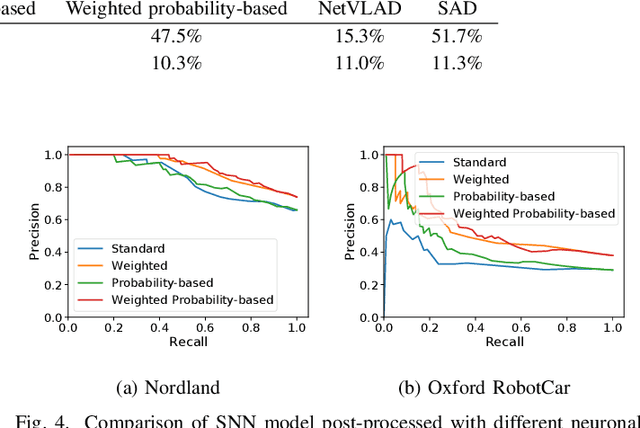
Spiking neural networks (SNNs) offer both compelling potential advantages, including energy efficiency and low latencies, and challenges including the non-differentiable nature of event spikes. Much of the initial research in this area has converted deep neural networks to equivalent SNNs, but this conversion approach potentially negates some of the potential advantages of SNN-based approaches developed from scratch. One promising area for high performance SNNs is template matching and image recognition. This research introduces the first high performance SNN for the Visual Place Recognition (VPR) task: given a query image, the SNN has to find the closest match out of a list of reference images. At the core of this new system is a novel assignment scheme that implements a form of ambiguity-informed salience, by up-weighting single-place-encoding neurons and down-weighting "ambiguous" neurons that respond to multiple different reference places. In a range of experiments on the challenging Oxford RobotCar and Nordland datasets, we show that our SNN achieves comparable VPR performance to state-of-the-art and classical techniques, and degrades gracefully in performance with an increasing number of reference places. Our results provide a significant milestone towards SNNs that can provide robust, energy-efficient and low latency robot localization.