 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsembles of Compact, Region-specific & Regularized Spiking Neural Networks for Scalable Place Recognition
Paper and Code
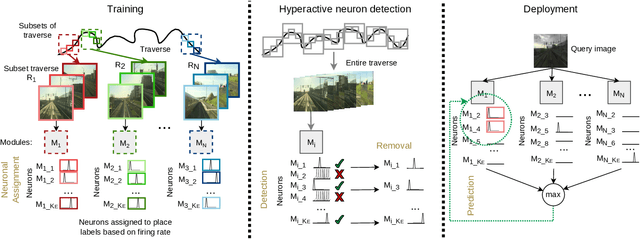
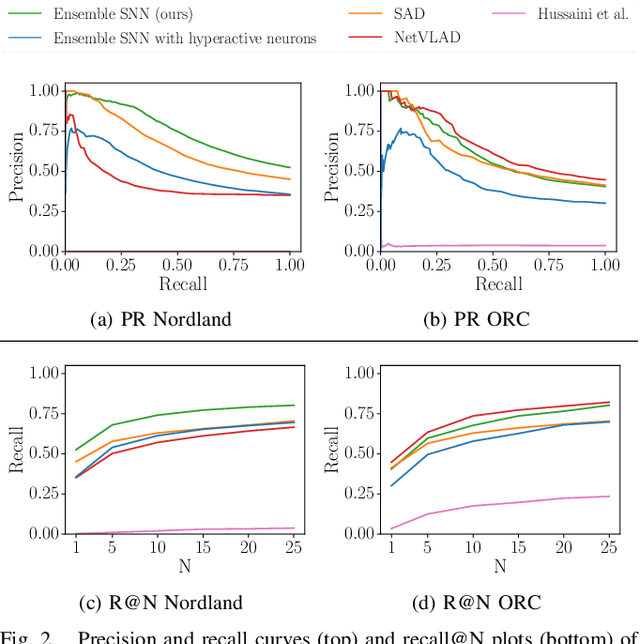
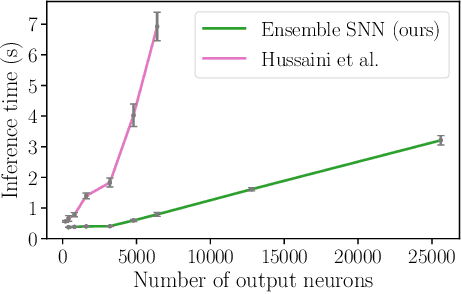
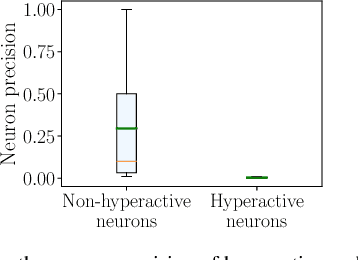
Spiking neural networks have significant potential utility in robotics due to their high energy efficiency on specialized hardware, but proof-of-concept implementations have not yet typically achieved competitive performance or capability with conventional approaches. In this paper, we tackle one of the key practical challenges of scalability by introducing a novel modular ensemble network approach, where compact, localized spiking networks each learn and are solely responsible for recognizing places in a local region of the environment only. This modular approach creates a highly scalable system. However, it comes with a high-performance cost where a lack of global regularization at deployment time leads to hyperactive neurons that erroneously respond to places outside their learned region. Our second contribution introduces a regularization approach that detects and removes these problematic hyperactive neurons during the initial environmental learning phase. We evaluate this new scalable modular system on benchmark localization datasets Nordland and Oxford RobotCar, with comparisons to both standard techniques NetVLAD and SAD, and a previous spiking neural network system. Our system substantially outperforms the previous SNN system on its small dataset, but also maintains performance on 27 times larger benchmark datasets where the operation of the previous system is computationally infeasible, and performs competitively with the conventional localization systems.