 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware-Efficient EMG Decoding for Next-Generation Hand Prostheses
May 31, 2024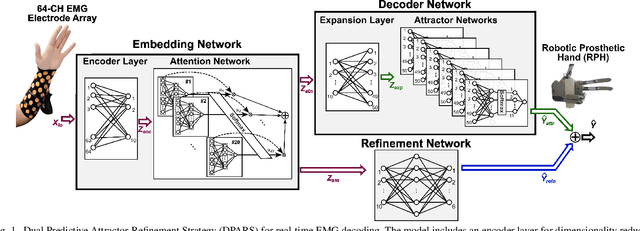
Advancements in neural engineering have enabled the development of Robotic Prosthetic Hands (RPHs) aimed at restoring hand functionality. Current commercial RPHs offer limited control through basic on/off commands. Recent progresses in machine learning enable finger movement decoding with higher degrees of freedom, yet the high computational complexity of such models limits their application in portable devices. Future RPH designs must balance portability, low power consumption, and high decoding accuracy to be practical for individuals with disabilities. To this end, we introduce a novel attractor-based neural network to realize on-chip movement decoding for next-generation portable RPHs. The proposed architecture comprises an encoder, an attention layer, an attractor network, and a refinement regressor. We tested our model on four healthy subjects and achieved a decoding accuracy of 80.3%. Our proposed model is over 120 and 50 times more compact compared to state-of-the-art LSTM and CNN models, respectively, with comparable (or superior) decoding accuracy. Therefore, it exhibits minimal hardware complexity and can be effectively integrated as a System-on-Chip.
Enhancing human bodies with extra robotic arms and fingers: The Neural Resource Allocation Problem
Mar 31, 2021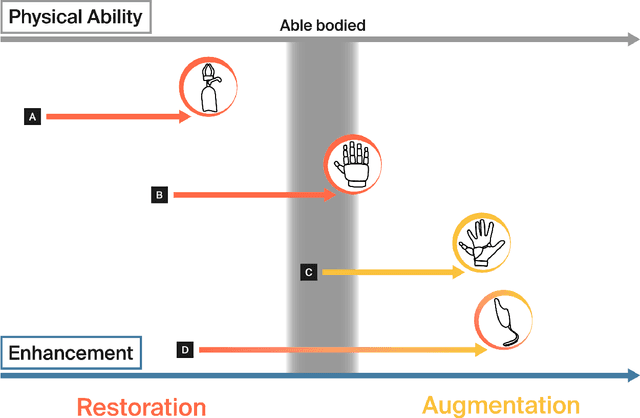
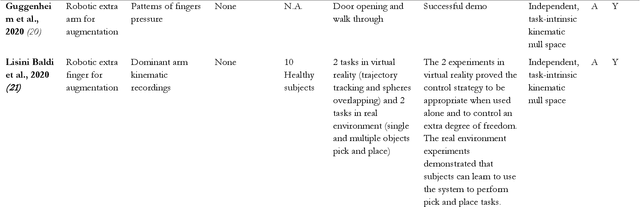
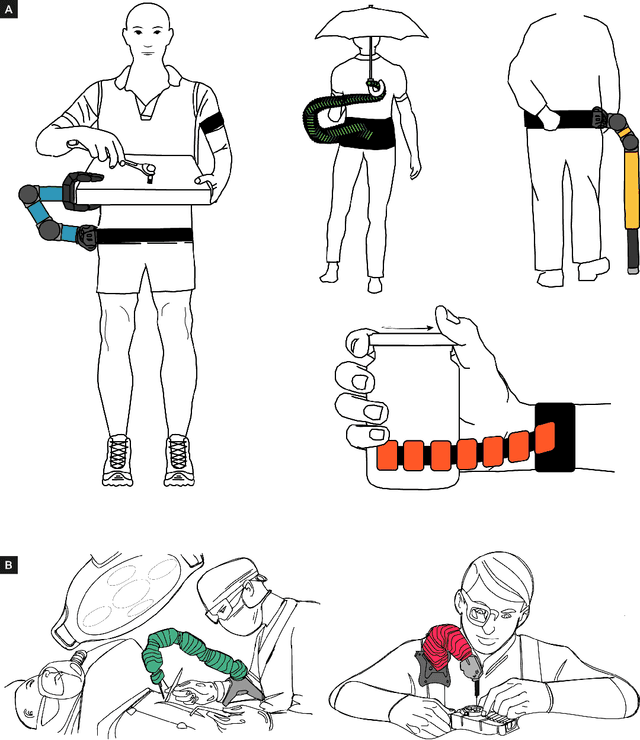
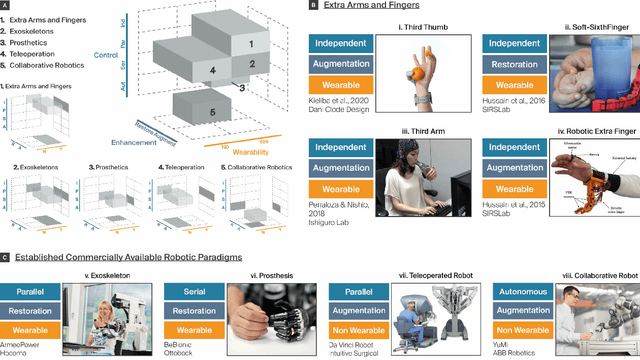
The emergence of robot-based body augmentation promises exciting innovations that will inform robotics, human-machine interaction, and wearable electronics. Even though augmentative devices like extra robotic arms and fingers in many ways build on restorative technologies, they introduce unique challenges for bidirectional human-machine collaboration. Can humans adapt and learn to operate a new limb collaboratively with their biological limbs without sacrificing their physical abilities? To successfully achieve robotic body augmentation, we need to ensure that by giving a person an additional (artificial) limb, we are not in fact trading off an existing (biological) one. In this manuscript, we introduce the "Neural Resource Allocation" problem, which distinguishes body augmentation from existing robotics paradigms such as teleoperation and prosthetics. We discuss how to allow the effective and effortless voluntary control of augmentative devices without compromising the voluntary control of the biological body. In reviewing the relevant literature on extra robotic fingers and limbs we critically assess the range of potential solutions available for the "Neural Resource Allocation" problem. For this purpose, we combine multiple perspectives from engineering and neuroscience with considerations from human-machine interaction, sensory-motor integration, ethics and law. Altogether we aim to define common foundations and operating principles for the successful implementation of motor augmentation.