 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShedding Light on VLN Robustness: A Black-box Framework for Indoor Lighting-based Adversarial Attack
Nov 17, 2025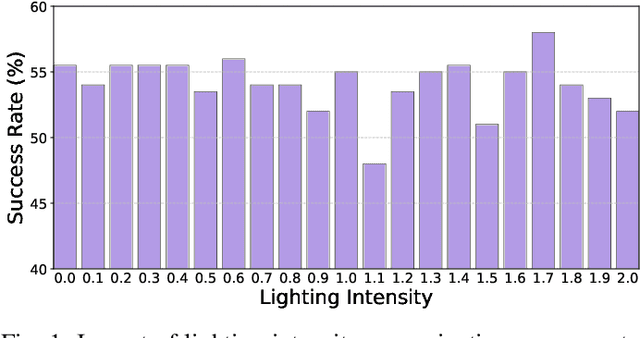
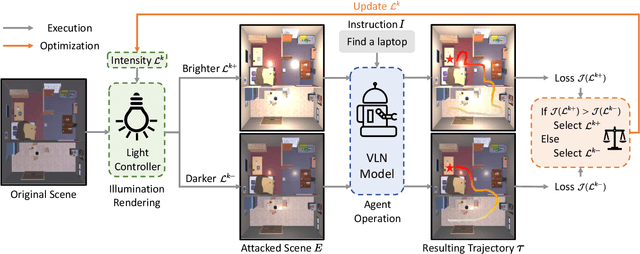
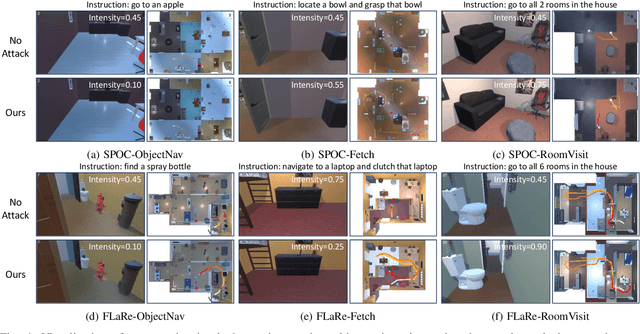
Vision-and-Language Navigation (VLN) agents have made remarkable progress, but their robustness remains insufficiently studied. Existing adversarial evaluations often rely on perturbations that manifest as unusual textures rarely encountered in everyday indoor environments. Errors under such contrived conditions have limited practical relevance, as real-world agents are unlikely to encounter such artificial patterns. In this work, we focus on indoor lighting, an intrinsic yet largely overlooked scene attribute that strongly influences navigation. We propose Indoor Lighting-based Adversarial Attack (ILA), a black-box framework that manipulates global illumination to disrupt VLN agents. Motivated by typical household lighting usage, we design two attack modes: Static Indoor Lighting-based Attack (SILA), where the lighting intensity remains constant throughout an episode, and Dynamic Indoor Lighting-based Attack (DILA), where lights are switched on or off at critical moments to induce abrupt illumination changes. We evaluate ILA on two state-of-the-art VLN models across three navigation tasks. Results show that ILA significantly increases failure rates while reducing trajectory efficiency, revealing previously unrecognized vulnerabilities of VLN agents to realistic indoor lighting variations.
Case Study: Runtime Safety Verification of Neural Network Controlled System
Aug 16, 2024Neural networks are increasingly used in safety-critical applications such as robotics and autonomous vehicles. However, the deployment of neural-network-controlled systems (NNCSs) raises significant safety concerns. Many recent advances overlook critical aspects of verifying control and ensuring safety in real-time scenarios. This paper presents a case study on using POLAR-Express, a state-of-the-art NNCS reachability analysis tool, for runtime safety verification in a Turtlebot navigation system using LiDAR. The Turtlebot, equipped with a neural network controller for steering, operates in a complex environment with obstacles. We developed a safe online controller switching strategy that switches between the original NNCS controller and an obstacle avoidance controller based on the verification results. Our experiments, conducted in a ROS2 Flatland simulation environment, explore the capabilities and limitations of using POLAR-Express for runtime verification and demonstrate the effectiveness of our switching strategy.
Empowering Autonomous Driving with Large Language Models: A Safety Perspective
Nov 28, 2023Autonomous Driving (AD) faces crucial hurdles for commercial launch, notably in the form of diminished public trust and safety concerns from long-tail unforeseen driving scenarios. This predicament is due to the limitation of deep neural networks in AD software, which struggle with interpretability and exhibit poor generalization capabilities in out-of-distribution and uncertain scenarios. To this end, this paper advocates for the integration of Large Language Models (LLMs) into the AD system, leveraging their robust common-sense knowledge, reasoning abilities, and human-interaction capabilities. The proposed approach deploys the LLM as an intelligent decision-maker in planning, incorporating safety verifiers for contextual safety learning to enhance overall AD performance and safety. We present results from two case studies that affirm the efficacy of our approach. We further discuss the potential integration of LLM for other AD software components including perception, prediction, and simulation. Despite the observed challenges in the case studies, the integration of LLMs is promising and beneficial for reinforcing both safety and performance in AD.