 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCausal Scene Narration with Runtime Safety Supervision for Vision-Language-Action Driving
Apr 02, 2026Vision-Language-Action (VLA) models for autonomous driving must integrate diverse textual inputs, including navigation commands, hazard warnings, and traffic state descriptions, yet current systems often present these as disconnected fragments, forcing the model to discover on its own which environmental constraints are relevant to the current maneuver. We introduce Causal Scene Narration (CSN), which restructures VLA text inputs through intent-constraint alignment, quantitative grounding, and structured separation, at inference time with zero GPU cost. We complement CSN with Simplex-based runtime safety supervision and training-time alignment via Plackett-Luce DPO with negative log-likelihood (NLL) regularization. A multi-town closed-loop CARLA evaluation shows that CSN improves Driving Score by +31.1% on original LMDrive and +24.5% on the preference-aligned variant. A controlled ablation reveals that causal structure accounts for 39.1% of this gain, with the remainder attributable to information content alone. A perception noise ablation confirms that CSN's benefit is robust to realistic sensing errors. Semantic safety supervision improves Infraction Score, while reactive Time-To-Collision monitoring degrades performance, demonstrating that intent-aware monitoring is needed for VLA systems.
An Open-Source Modular Benchmark for Diffusion-Based Motion Planning in Closed-Loop Autonomous Driving
Mar 01, 2026Diffusion-based motion planners have achieved state-of-the-art results on benchmarks such as nuPlan, yet their evaluation within closed-loop production autonomous driving stacks remains largely unexplored. Existing evaluations abstract away ROS 2 communication latency and real-time scheduling constraints, while monolithic ONNX deployment freezes all solver parameters at export time. We present an open-source modular benchmark that addresses both gaps: using ONNX GraphSurgeon, we decompose a monolithic 18,398 node diffusion planner into three independently executable modules and reimplement the DPM-Solver++ denoising loop in native C++. Integrated as a ROS 2 node within Autoware, the open-source AD stack deployed on real vehicles worldwide, the system enables runtime-configurable solver parameters without model recompilation and per-step observability of the denoising process, breaking the black box of monolithic deployment. Unlike evaluations in standalone simulators such as CARLA, our benchmark operates within a production-grade stack and is validated through AWSIM closed-loop simulation. Through systematic comparison of DPM-Solver++ (first- and second-order) and DDIM across six step-count configurations (N in {3, 5, 7, 10, 15, 20}), we show that encoder caching yields a 3.2x latency reduction, and that second-order solving reduces FDE by 41% at N=3 compared to first-order. The complete codebase will be released as open-source, providing a direct path from simulation benchmarks to real-vehicle deployment.
Towards Goal-Oriented Agents for Evolving Problems Observed via Conversation
Jan 11, 2024The objective of this work is to train a chatbot capable of solving evolving problems through conversing with a user about a problem the chatbot cannot directly observe. The system consists of a virtual problem (in this case a simple game), a simulated user capable of answering natural language questions that can observe and perform actions on the problem, and a Deep Q-Network (DQN)-based chatbot architecture. The chatbot is trained with the goal of solving the problem through dialogue with the simulated user using reinforcement learning. The contributions of this paper are as follows: a proposed architecture to apply a conversational DQN-based agent to evolving problems, an exploration of training methods such as curriculum learning on model performance and the effect of modified reward functions in the case of increasing environment complexity.
* 15 pages, 7 figures
Identification of Vehicle Dynamics Parameters Using Simulation-based Inference
Aug 27, 2021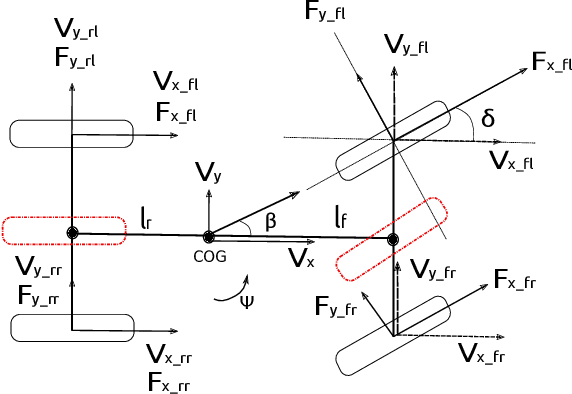
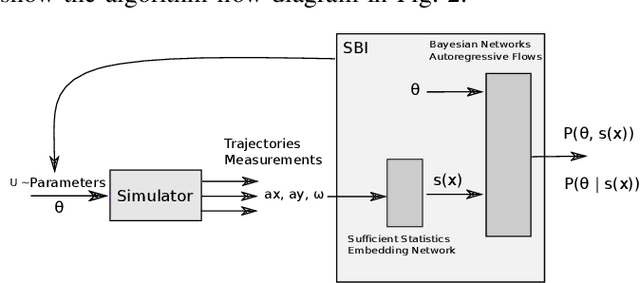
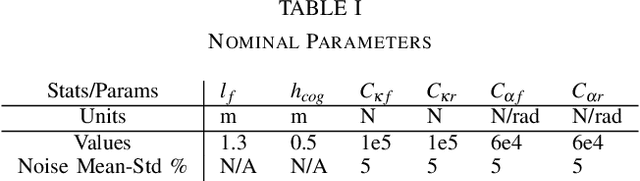
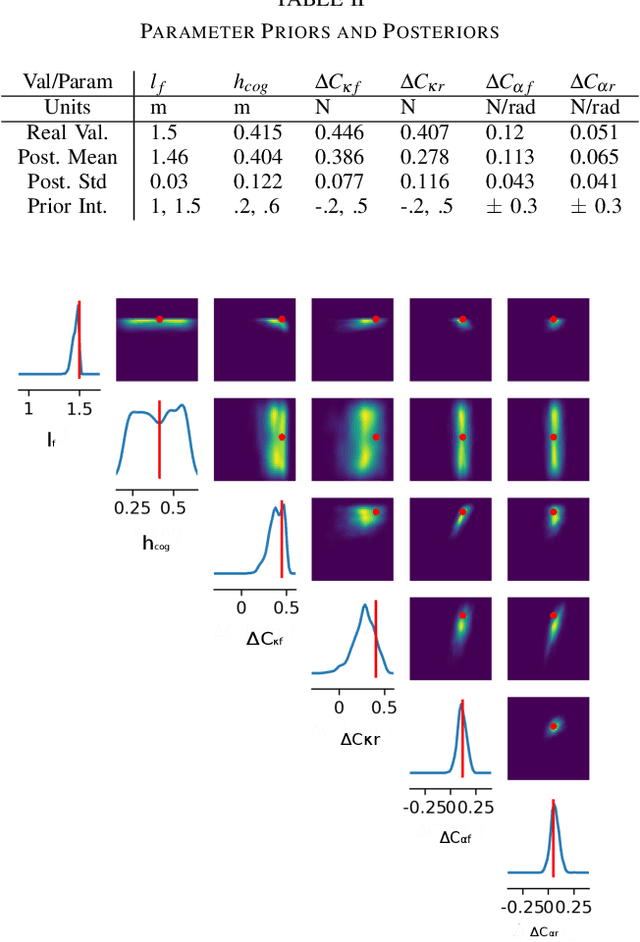
Identifying tire and vehicle parameters is an essential step in designing control and planning algorithms for autonomous vehicles. This paper proposes a new method: Simulation-Based Inference (SBI), a modern interpretation of Approximate Bayesian Computation methods (ABC) for parameter identification. The simulation-based inference is an emerging method in the machine learning literature and has proven to yield accurate results for many parameter sets in complex problems. We demonstrate in this paper that it can handle the identification of highly nonlinear vehicle dynamics parameters and gives accurate estimates of the parameters for the governing equations.
Learning a Model for Inferring a Spatial Road Lane Network Graph using Self-Supervision
Jul 05, 2021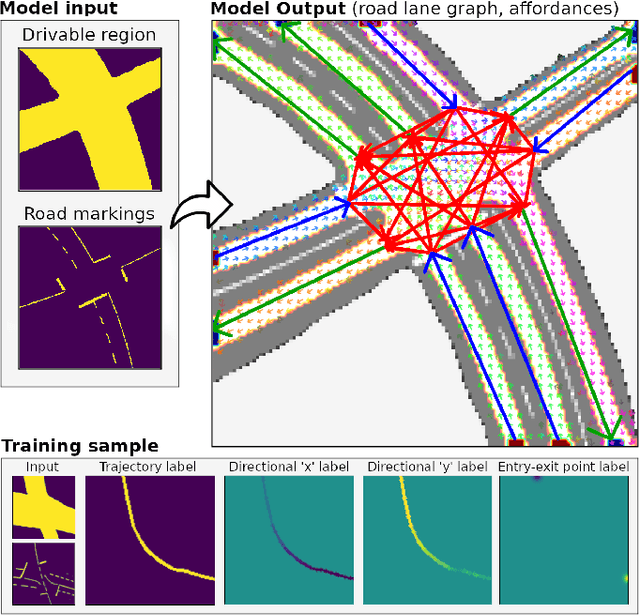
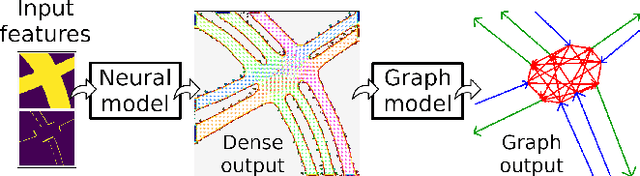

Interconnected road lanes are a central concept for navigating urban roads. Currently, most autonomous vehicles rely on preconstructed lane maps as designing an algorithmic model is difficult. However, the generation and maintenance of such maps is costly and hinders large-scale adoption of autonomous vehicle technology. This paper presents the first self-supervised learning method to train a model to infer a spatially grounded lane-level road network graph based on a dense segmented representation of the road scene generated from onboard sensors. A formal road lane network model is presented and proves that any structured road scene can be represented by a directed acyclic graph of at most depth three while retaining the notion of intersection regions, and that this is the most compressed representation. The formal model is implemented by a hybrid neural and search-based model, utilizing a novel barrier function loss formulation for robust learning from partial labels. Experiments are conducted for all common road intersection layouts. Results show that the model can generalize to new road layouts, unlike previous approaches, demonstrating its potential for real-world application as a practical learning-based lane-level map generator.
Probabilistic Rainfall Estimation from Automotive Lidar
Apr 23, 2021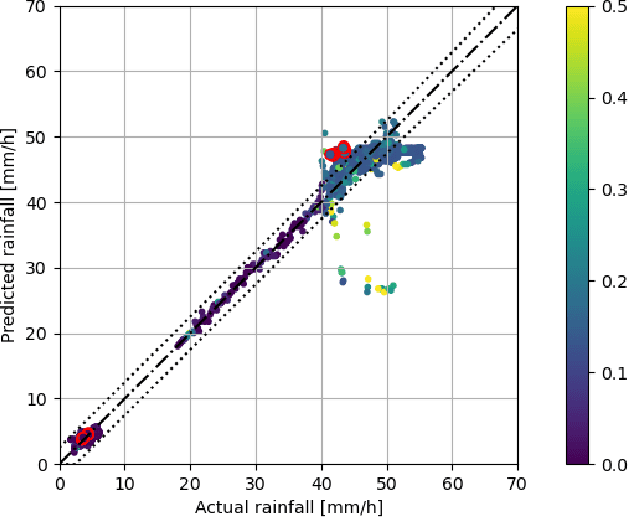
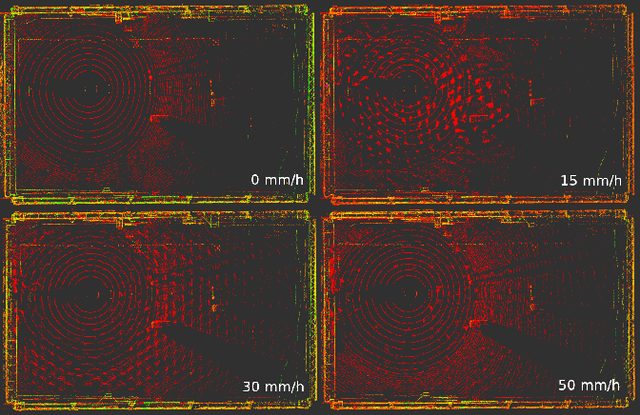

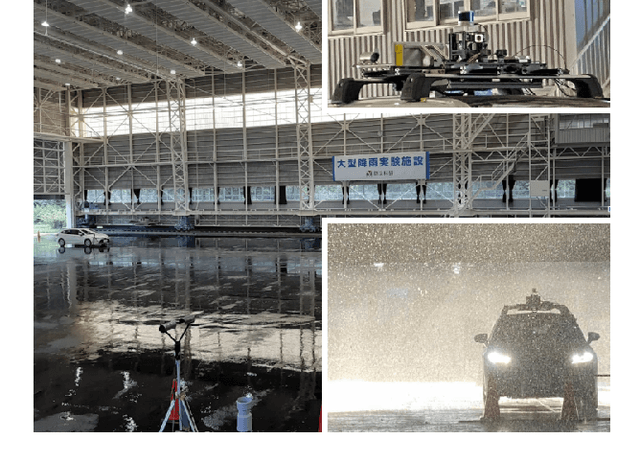
Robust sensing and perception in adverse weather conditions remains one of the biggest challenges for realizing reliable autonomous vehicle mobility services. Prior work has established that rainfall rate is a useful measure for adversity of atmospheric weather conditions. This work presents a probabilistic hierarchical Bayesian model that infers rainfall rate from automotive lidar point cloud sequences with high accuracy and reliability. The model is a hierarchical mixture of expert model, or a probabilistic decision tree, with gating and expert nodes consisting of variational logistic and linear regression models. Experimental data used to train and evaluate the model is collected in a large-scale rainfall experiment facility from both stationary and moving vehicle platforms. The results show prediction accuracy comparable to the measurement resolution of a disdrometer, and the soundness and usefulness of the uncertainty estimation. The model achieves RMSE 2.42 mm/h after filtering out uncertain predictions. The error is comparable to the mean rainfall rate change of 3.5 mm/h between measurements. Model parameter studies show how predictive performance changes with tree depth, sampling duration, and crop box dimension. A second experiment demonstrate the predictability of higher rainfall above 300 mm/h using a different lidar sensor, demonstrating sensor independence.
Autonomous Parking by Successive Convexification and Compound State Triggers
Oct 11, 2020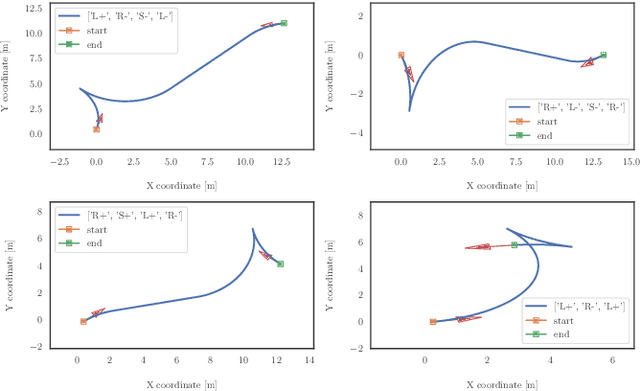
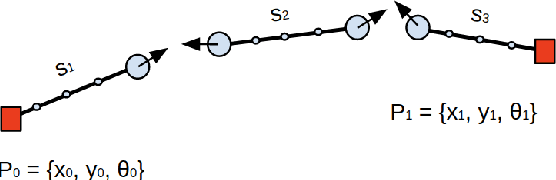
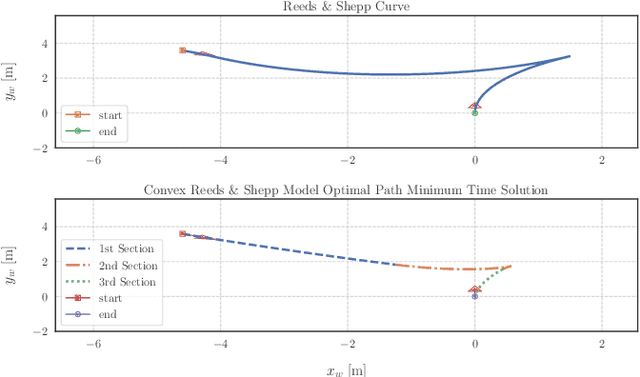
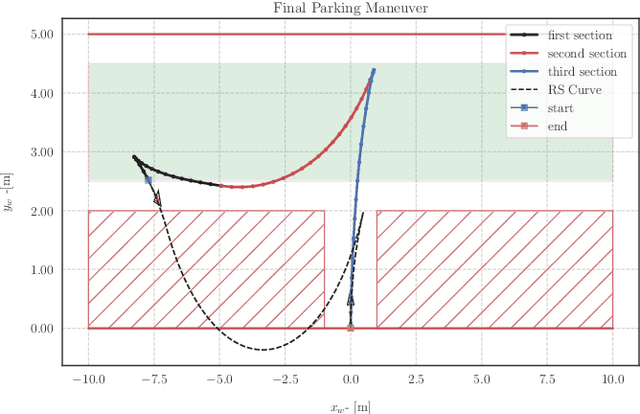
In this paper, we propose an algorithm for optimal generation of nonholonomic paths for planning parking maneuvers with a kinematic car model. We demonstrate the use of Successive Convexification algorithms (SCvx), which guarantee path feasibility and constraint satisfaction, for parking scenarios. In addition, we formulate obstacle avoidance with state-triggered constraints which enables the use of logical constraints in a continuous formulation of optimization problems. This paper contributes to the optimal nonholonomic path planning literature by demonstrating the use of SCvx and state-triggered constraints which allows the formulation of the parking problem as a single optimisation problem. The resulting algorithm can be used to plan constrained paths with cusp points in narrow parking environments.