 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentification of Vehicle Dynamics Parameters Using Simulation-based Inference
Aug 27, 2021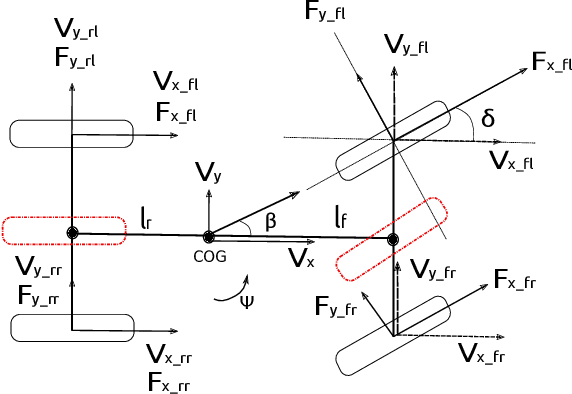
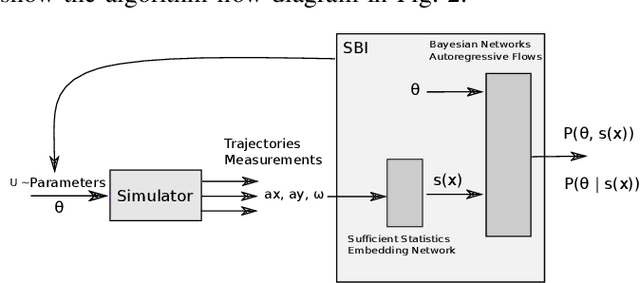
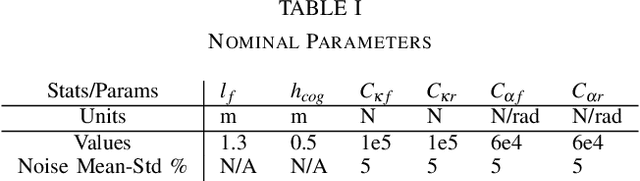
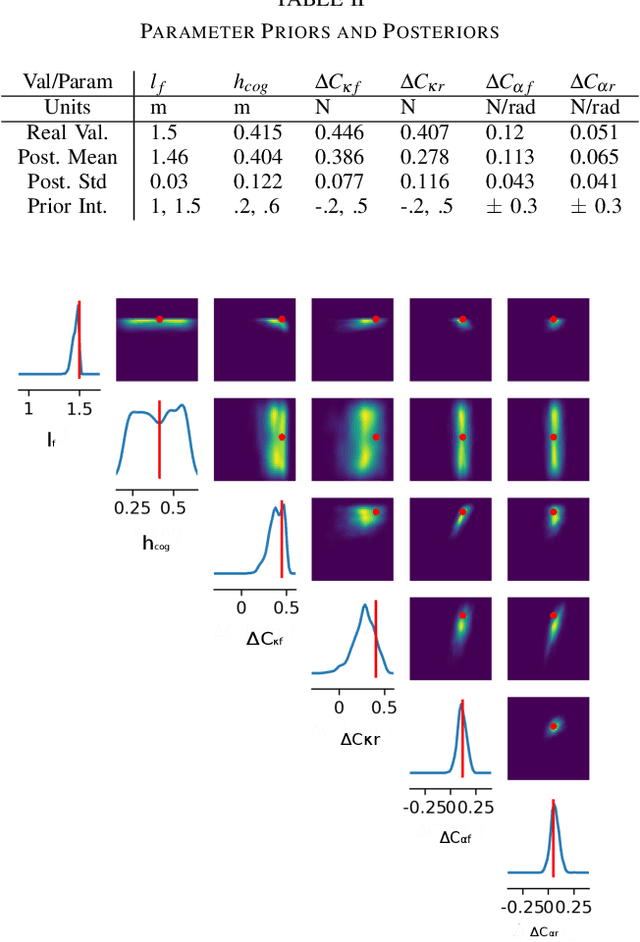
Identifying tire and vehicle parameters is an essential step in designing control and planning algorithms for autonomous vehicles. This paper proposes a new method: Simulation-Based Inference (SBI), a modern interpretation of Approximate Bayesian Computation methods (ABC) for parameter identification. The simulation-based inference is an emerging method in the machine learning literature and has proven to yield accurate results for many parameter sets in complex problems. We demonstrate in this paper that it can handle the identification of highly nonlinear vehicle dynamics parameters and gives accurate estimates of the parameters for the governing equations.
Autonomous Parking by Successive Convexification and Compound State Triggers
Oct 11, 2020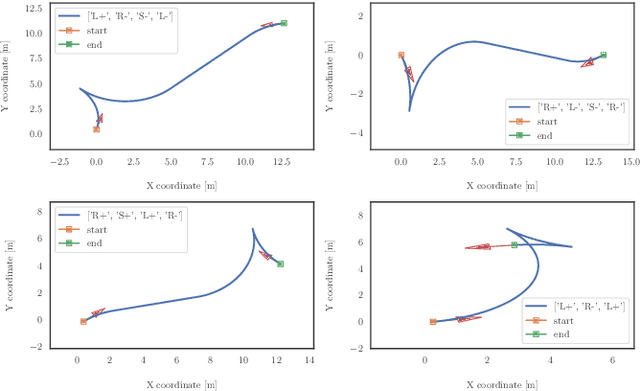
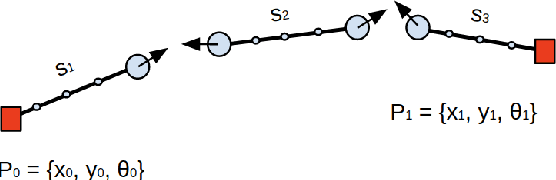
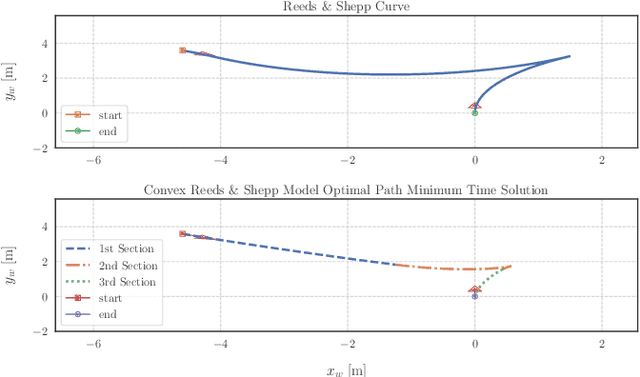
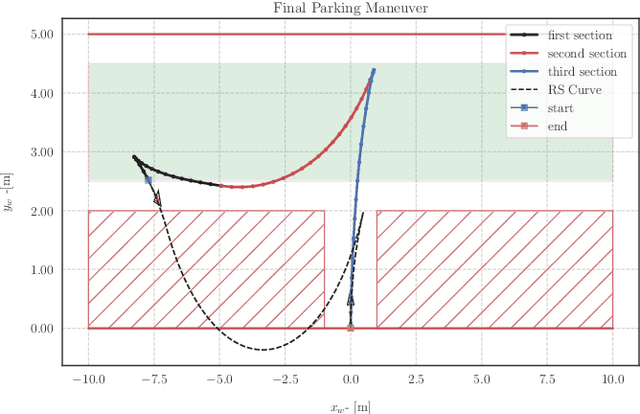
In this paper, we propose an algorithm for optimal generation of nonholonomic paths for planning parking maneuvers with a kinematic car model. We demonstrate the use of Successive Convexification algorithms (SCvx), which guarantee path feasibility and constraint satisfaction, for parking scenarios. In addition, we formulate obstacle avoidance with state-triggered constraints which enables the use of logical constraints in a continuous formulation of optimization problems. This paper contributes to the optimal nonholonomic path planning literature by demonstrating the use of SCvx and state-triggered constraints which allows the formulation of the parking problem as a single optimisation problem. The resulting algorithm can be used to plan constrained paths with cusp points in narrow parking environments.
A Tutorial On Autonomous Vehicle Steering Controller Design, Simulation and Implementation
Mar 10, 2018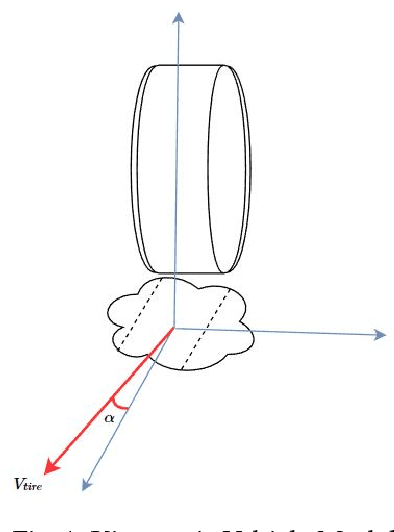
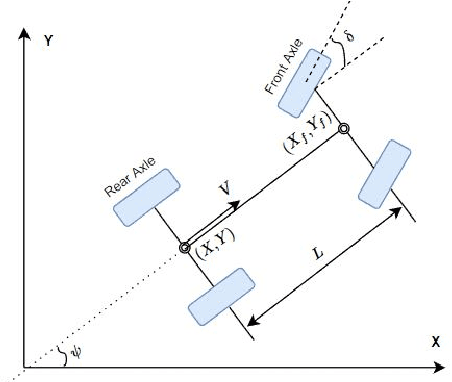
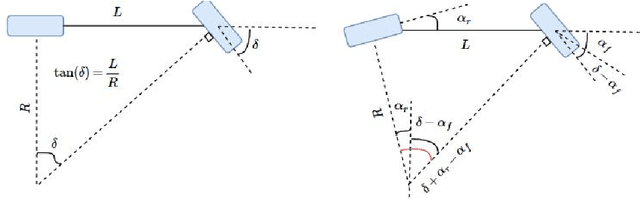
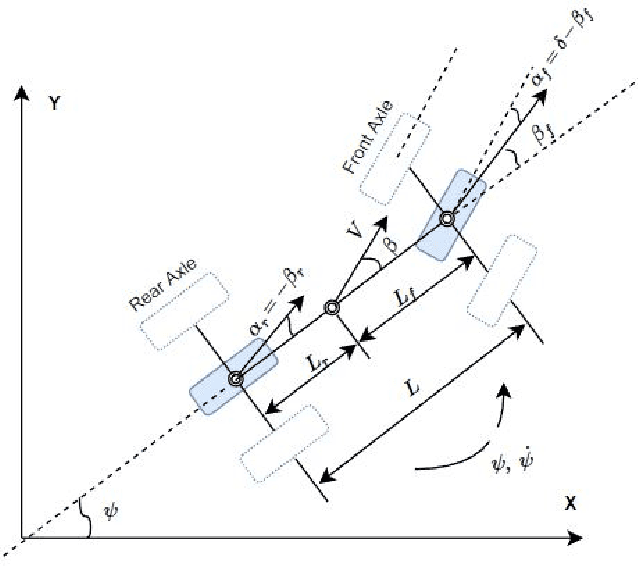
In this tutorial, we detailed simple controllers for autonomous parking and path following for self-driving cars and provided practical methods for curvature computation.
Continuous and Simultaneous Gesture and Posture Recognition for Commanding a Robotic Wheelchair; Towards Spotting the Signal Patterns
Dec 02, 2015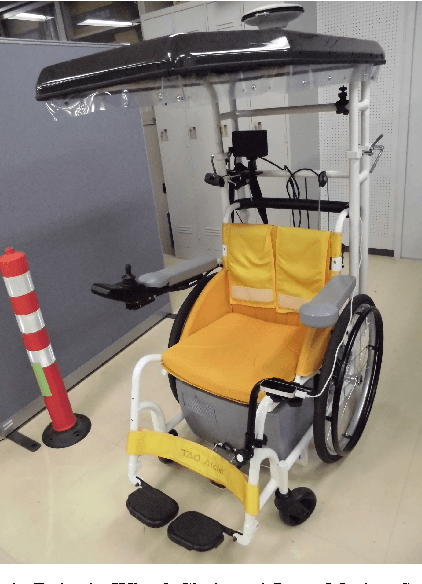
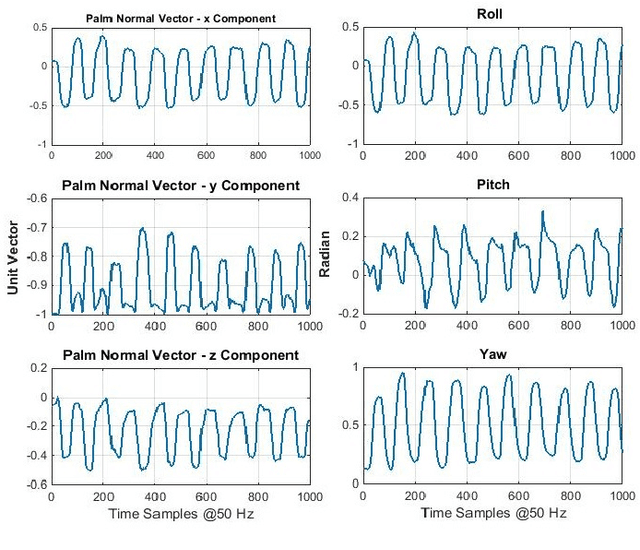
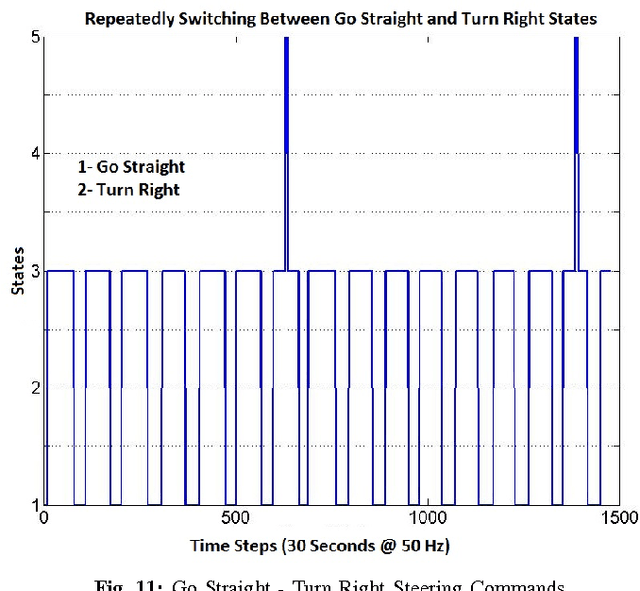
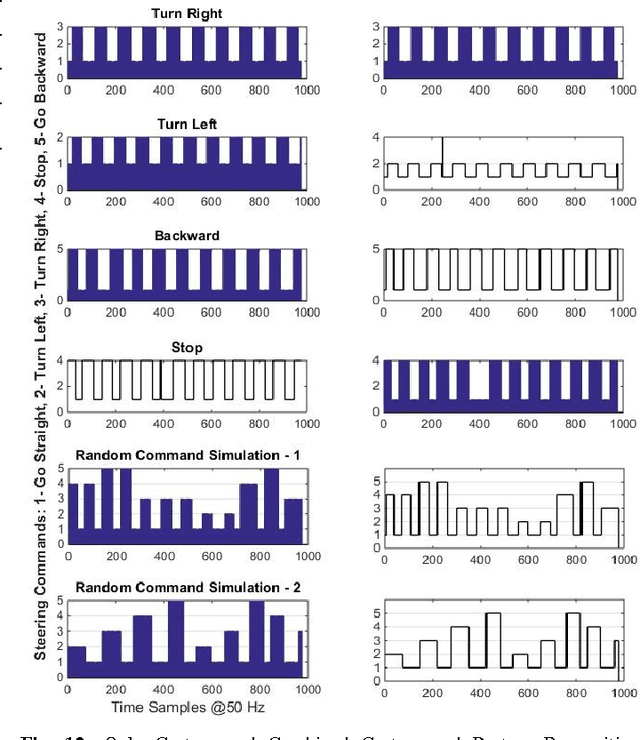
Spotting signal patterns with varying lengths has been still an open problem in the literature. In this study, we describe a signal pattern recognition approach for continuous and simultaneous classification of a tracked hand's posture and gestures and map them to steering commands for control of a robotic wheelchair. The developed methodology not only affords 100\% recognition accuracy on a streaming signal for continuous recognition, but also brings about a new perspective for building a training dictionary which eliminates human intervention to spot the gesture or postures on a training signal. In the training phase we employ a state of art subspace clustering method to find the most representative state samples. The recognition and training framework reveal boundaries of the patterns on the streaming signal with a successive decision tree structure intrinsically. We make use of the Collaborative ans Block Sparse Representation based classification methods for continuous gesture and posture recognition.
Spectral Collaborative Representation based Classification for Hand Gestures recognition on Electromyography Signals
Jun 26, 2015
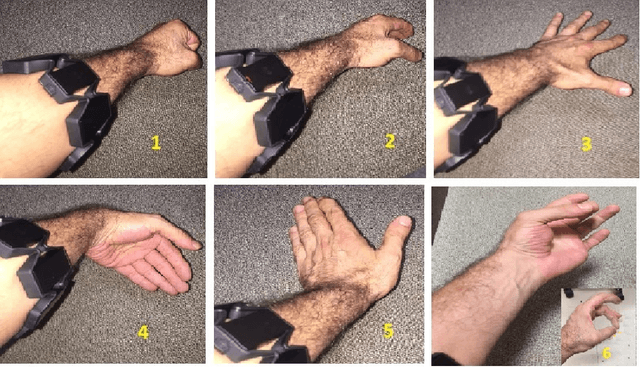
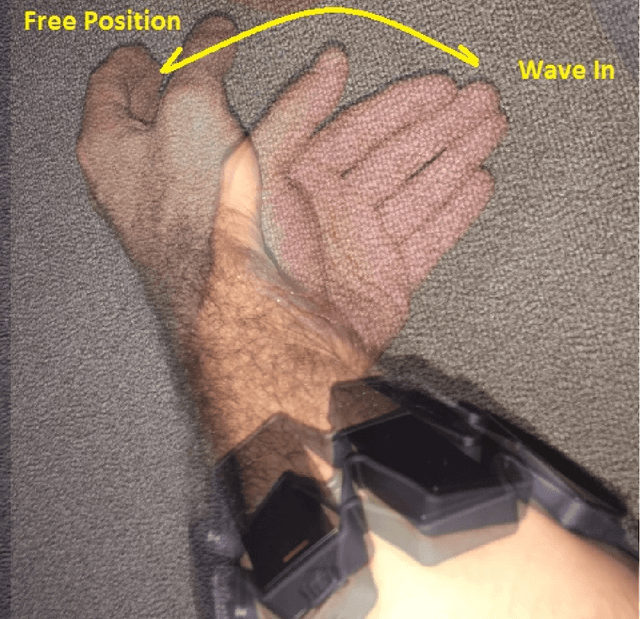
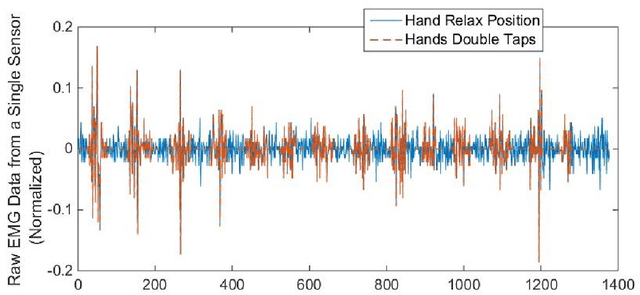
In this study, we introduce a novel variant and application of the Collaborative Representation based Classification in spectral domain for recognition of the hand gestures using the raw surface Electromyography signals. The intuitive use of spectral features are explained via circulant matrices. The proposed Spectral Collaborative Representation based Classification (SCRC) is able to recognize gestures with higher levels of accuracy for a fairly rich gesture set. The worst recognition result which is the best in the literature is obtained as 97.3\% among the four sets of the experiments for each hand gestures. The recognition results are reported with a substantial number of experiments and labeling computation.
Paradigm Shift in Continuous Signal Pattern Classification: Mobile Ride Assistance System for two-wheeled Mobility Robots
Jun 16, 2015
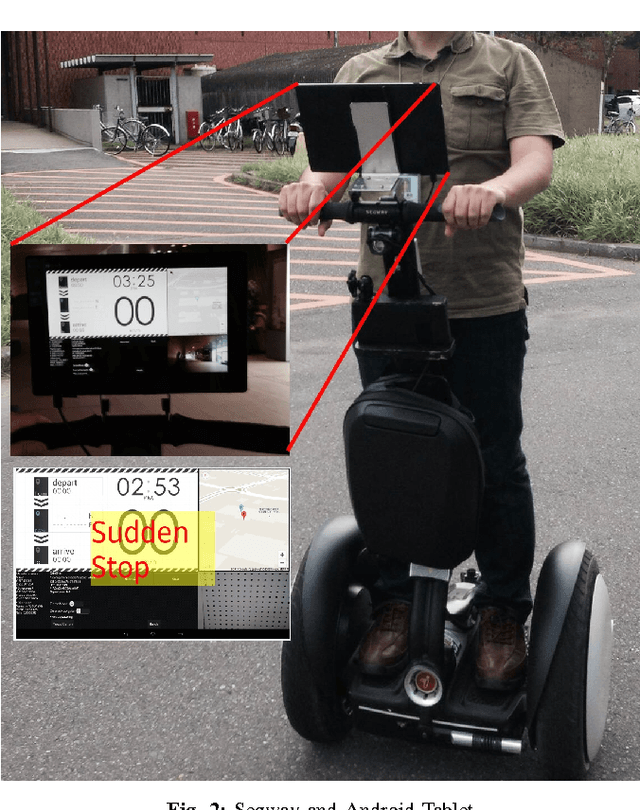
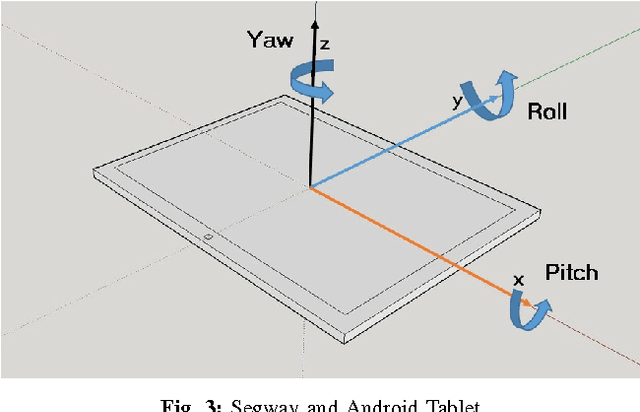
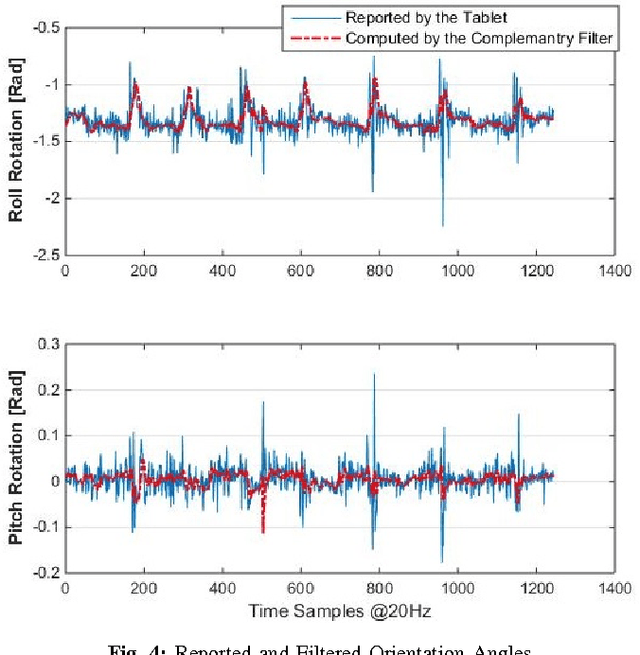
In this study we describe the development of a ride assistance application which can be implemented on the widespread smart phones and tablet. The ride assistance application has a signal processing and pattern classification module which yield almost 100% recognition accuracy for real-time signal pattern classification. We introduce a novel framework to build a training dictionary with an overwhelming discriminating capacity which eliminates the need of human intervention spotting the pattern on the training samples. We verify the recognition accuracy of the proposed methodologies by providing the results of another study in which the hand posture and gestures are tracked and recognized for steering a robotic wheelchair.