 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous and Simultaneous Gesture and Posture Recognition for Commanding a Robotic Wheelchair; Towards Spotting the Signal Patterns
Dec 02, 2015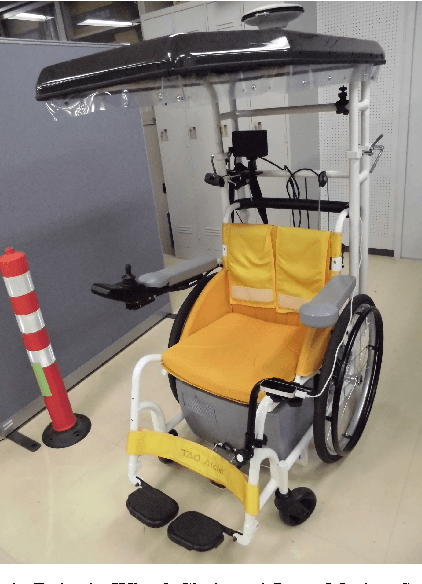
Spotting signal patterns with varying lengths has been still an open problem in the literature. In this study, we describe a signal pattern recognition approach for continuous and simultaneous classification of a tracked hand's posture and gestures and map them to steering commands for control of a robotic wheelchair. The developed methodology not only affords 100\% recognition accuracy on a streaming signal for continuous recognition, but also brings about a new perspective for building a training dictionary which eliminates human intervention to spot the gesture or postures on a training signal. In the training phase we employ a state of art subspace clustering method to find the most representative state samples. The recognition and training framework reveal boundaries of the patterns on the streaming signal with a successive decision tree structure intrinsically. We make use of the Collaborative ans Block Sparse Representation based classification methods for continuous gesture and posture recognition.