 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentification of Vehicle Dynamics Parameters Using Simulation-based Inference
Aug 27, 2021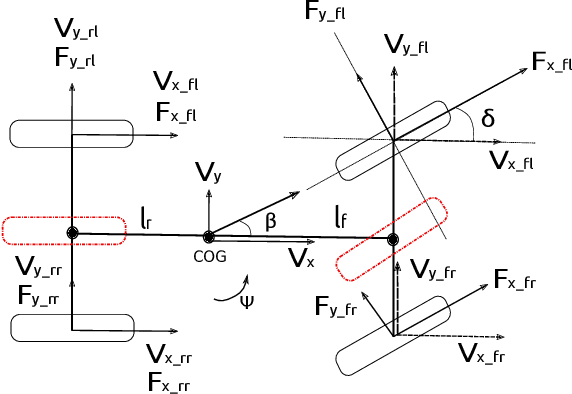
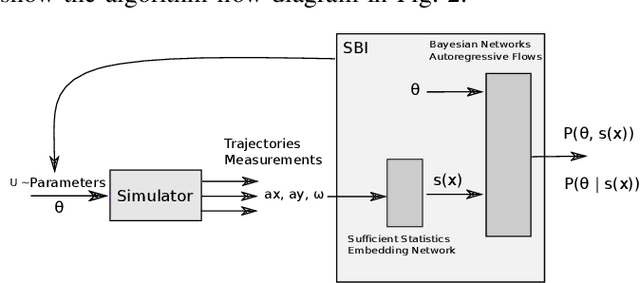
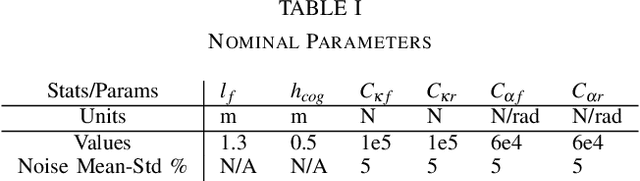
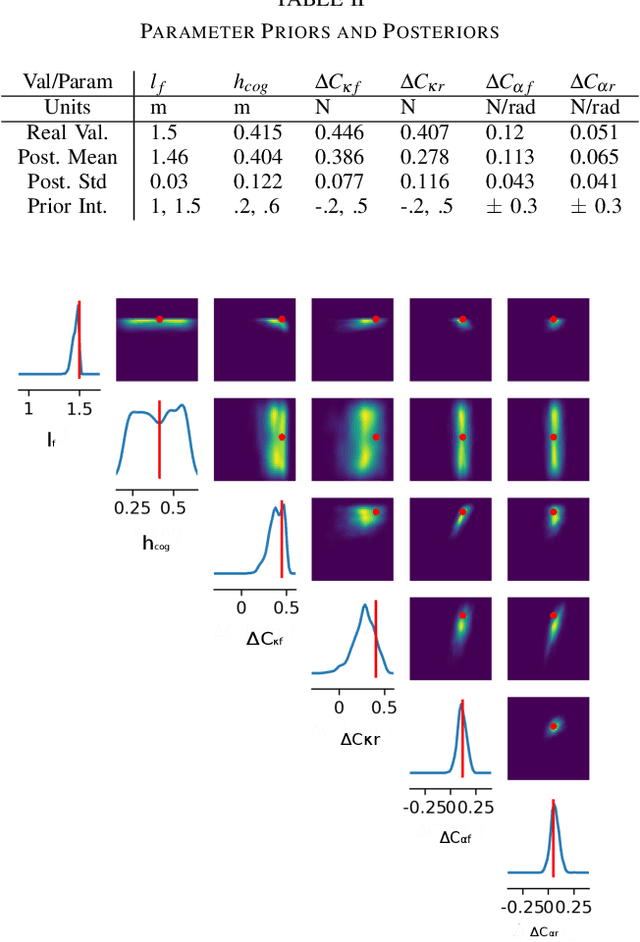
Identifying tire and vehicle parameters is an essential step in designing control and planning algorithms for autonomous vehicles. This paper proposes a new method: Simulation-Based Inference (SBI), a modern interpretation of Approximate Bayesian Computation methods (ABC) for parameter identification. The simulation-based inference is an emerging method in the machine learning literature and has proven to yield accurate results for many parameter sets in complex problems. We demonstrate in this paper that it can handle the identification of highly nonlinear vehicle dynamics parameters and gives accurate estimates of the parameters for the governing equations.
Learning a Model for Inferring a Spatial Road Lane Network Graph using Self-Supervision
Jul 05, 2021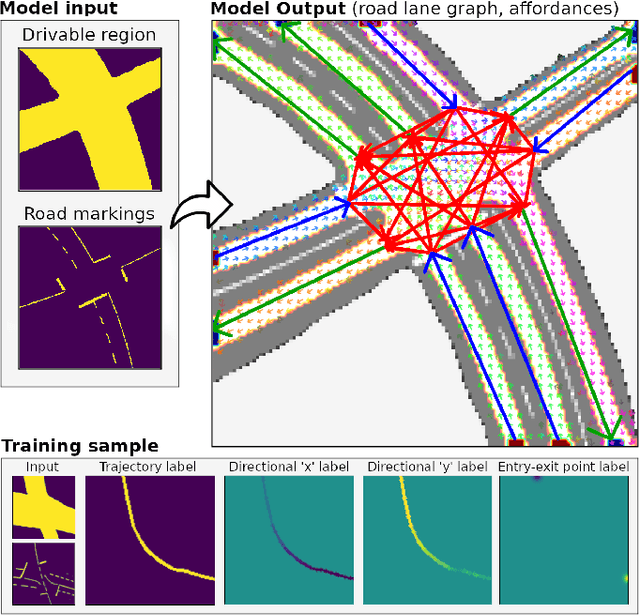
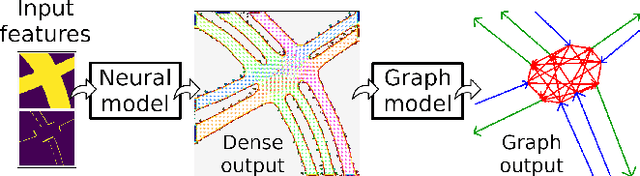
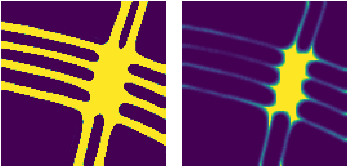

Interconnected road lanes are a central concept for navigating urban roads. Currently, most autonomous vehicles rely on preconstructed lane maps as designing an algorithmic model is difficult. However, the generation and maintenance of such maps is costly and hinders large-scale adoption of autonomous vehicle technology. This paper presents the first self-supervised learning method to train a model to infer a spatially grounded lane-level road network graph based on a dense segmented representation of the road scene generated from onboard sensors. A formal road lane network model is presented and proves that any structured road scene can be represented by a directed acyclic graph of at most depth three while retaining the notion of intersection regions, and that this is the most compressed representation. The formal model is implemented by a hybrid neural and search-based model, utilizing a novel barrier function loss formulation for robust learning from partial labels. Experiments are conducted for all common road intersection layouts. Results show that the model can generalize to new road layouts, unlike previous approaches, demonstrating its potential for real-world application as a practical learning-based lane-level map generator.
Probabilistic Rainfall Estimation from Automotive Lidar
Apr 23, 2021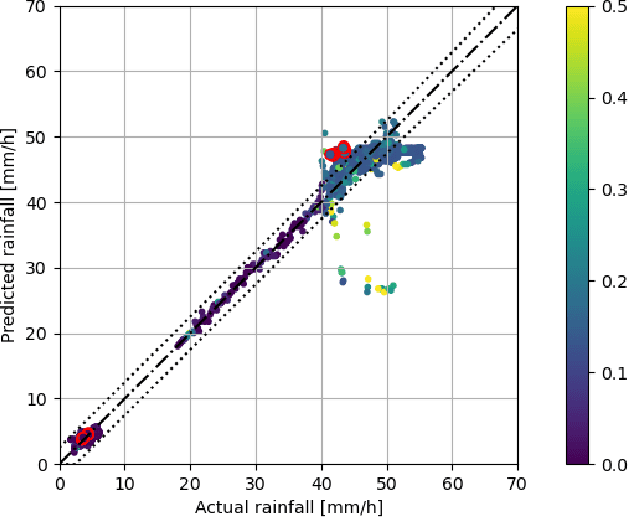
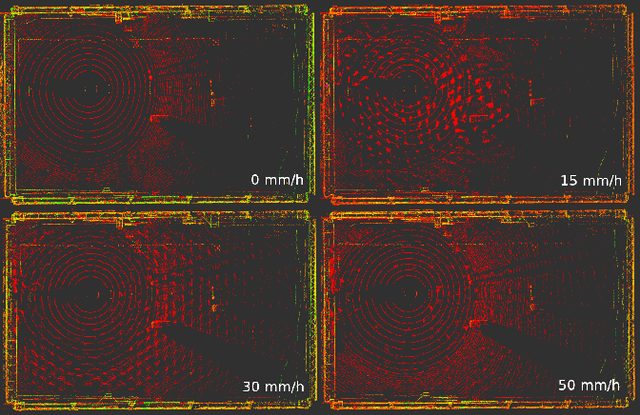

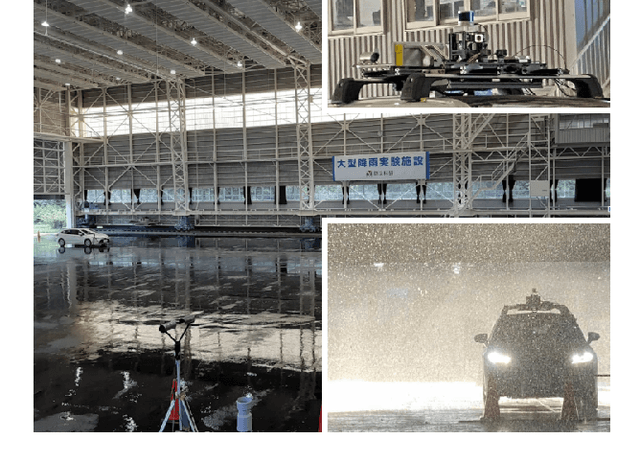
Robust sensing and perception in adverse weather conditions remains one of the biggest challenges for realizing reliable autonomous vehicle mobility services. Prior work has established that rainfall rate is a useful measure for adversity of atmospheric weather conditions. This work presents a probabilistic hierarchical Bayesian model that infers rainfall rate from automotive lidar point cloud sequences with high accuracy and reliability. The model is a hierarchical mixture of expert model, or a probabilistic decision tree, with gating and expert nodes consisting of variational logistic and linear regression models. Experimental data used to train and evaluate the model is collected in a large-scale rainfall experiment facility from both stationary and moving vehicle platforms. The results show prediction accuracy comparable to the measurement resolution of a disdrometer, and the soundness and usefulness of the uncertainty estimation. The model achieves RMSE 2.42 mm/h after filtering out uncertain predictions. The error is comparable to the mean rainfall rate change of 3.5 mm/h between measurements. Model parameter studies show how predictive performance changes with tree depth, sampling duration, and crop box dimension. A second experiment demonstrate the predictability of higher rainfall above 300 mm/h using a different lidar sensor, demonstrating sensor independence.