 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Rainfall Estimation from Automotive Lidar
Apr 23, 2021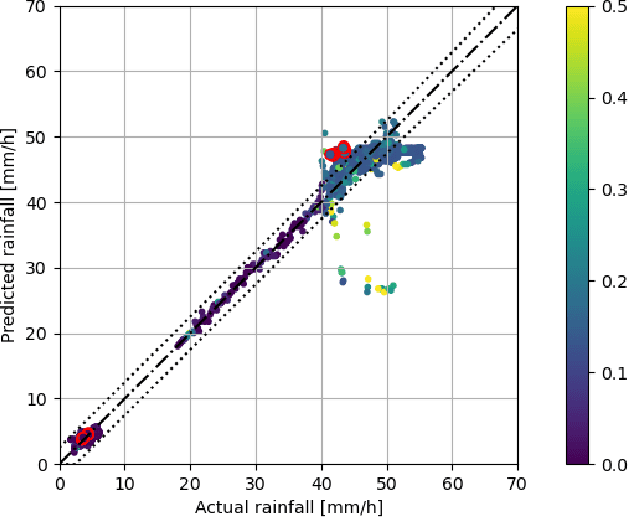
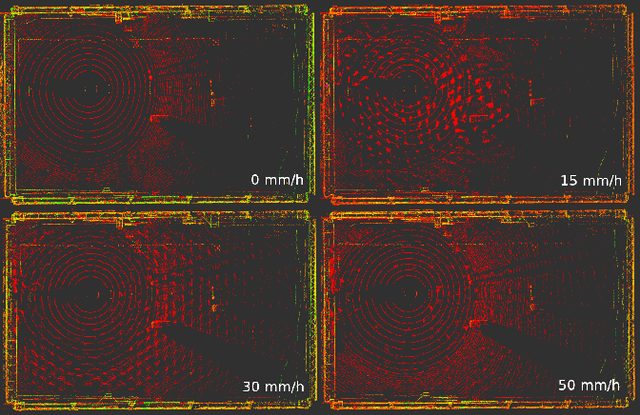

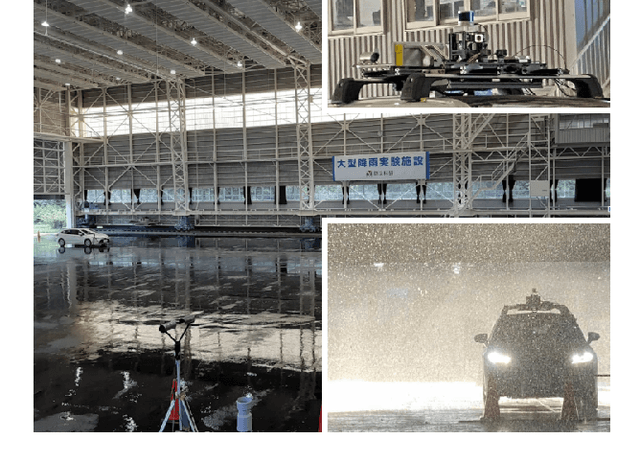
Robust sensing and perception in adverse weather conditions remains one of the biggest challenges for realizing reliable autonomous vehicle mobility services. Prior work has established that rainfall rate is a useful measure for adversity of atmospheric weather conditions. This work presents a probabilistic hierarchical Bayesian model that infers rainfall rate from automotive lidar point cloud sequences with high accuracy and reliability. The model is a hierarchical mixture of expert model, or a probabilistic decision tree, with gating and expert nodes consisting of variational logistic and linear regression models. Experimental data used to train and evaluate the model is collected in a large-scale rainfall experiment facility from both stationary and moving vehicle platforms. The results show prediction accuracy comparable to the measurement resolution of a disdrometer, and the soundness and usefulness of the uncertainty estimation. The model achieves RMSE 2.42 mm/h after filtering out uncertain predictions. The error is comparable to the mean rainfall rate change of 3.5 mm/h between measurements. Model parameter studies show how predictive performance changes with tree depth, sampling duration, and crop box dimension. A second experiment demonstrate the predictability of higher rainfall above 300 mm/h using a different lidar sensor, demonstrating sensor independence.