 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn in-Contact Robotic System for the Process of Desoldering PCB Components
Mar 08, 2024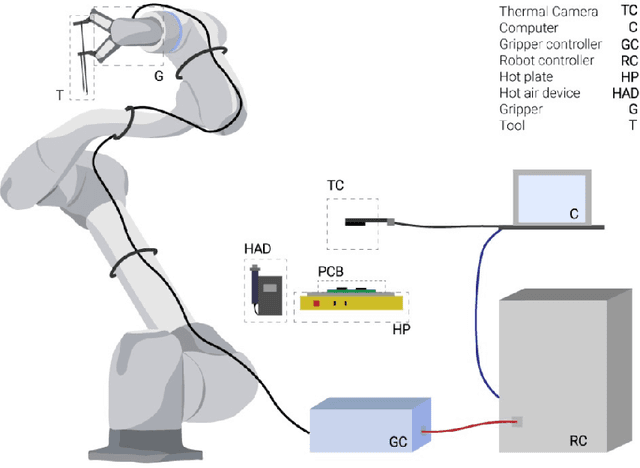
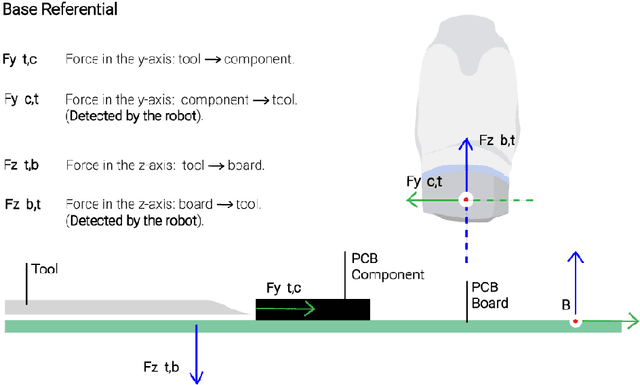
The disposal and recycling of electronic waste (e-waste) is a global challenge. The disassembly of components is a crucial step towards an efficient recycling process, avoiding the destructive methods. Although most disassembly work is still done manually due to the diversity and complexity of components, there is a growing interest in developing automated methods to improve efficiency and reduce labor costs. This study aims to robotize the desoldering process and extracting components from printed circuit boards (PCBs), with the goal of automating the process as much as possible. The proposed strategy consists of several phases, including the controlled contact of the robotic tool with the PCB components. A specific tool was developed to apply a controlled force against the PCB component, removing it from the board. The results demonstrate that it is feasible to remove the PCB components with a high success rate (approximately 100% for the bigger PCB components).
Intuitive Robot Programming by Capturing Human Manufacturing Skills: A Framework for the Process of Glass Adhesive Application
Sep 15, 2022

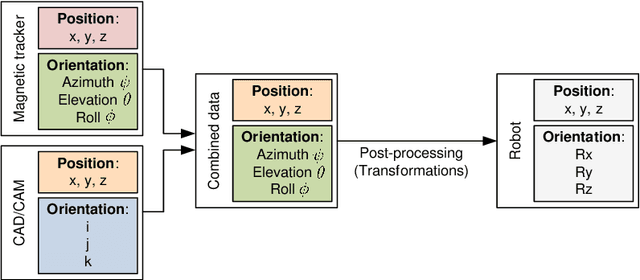
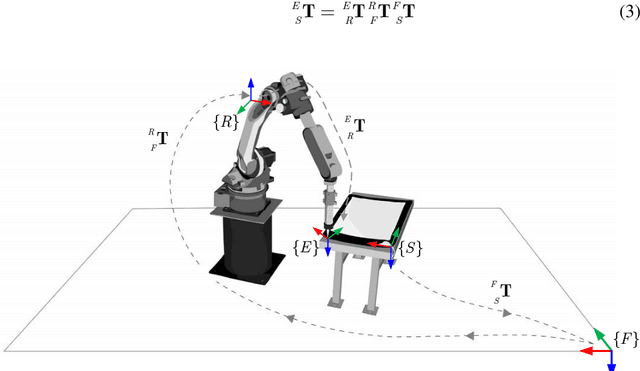
There is a great demand for the robotization of manufacturing processes fea-turing monotonous labor. Some manufacturing tasks requiring specific skills (welding, painting, etc.) suffer from a lack of workers. Robots have been used in these tasks, but their flexibility is limited since they are still difficult to program/re-program by non-experts, making them inaccessible to most companies. Robot offline programming (OLP) is reliable. However, generat-ed paths directly from CAD/CAM do not include relevant parameters repre-senting human skills such as robot end-effector orientations and velocities. This paper presents an intuitive robot programming system to capture human manufacturing skills and transform them into robot programs. Demonstra-tions from human skilled workers are recorded using a magnetic tracking system attached to the worker tools. Collected data include the orientations and velocity of the working paths. Positional data are extracted from CAD/CAM since its error when captured by the magnetic tracker, is signifi-cant. Paths poses are transformed in Cartesian space and validated in a simu-lation environment. Robot programs are generated and transferred to the real robot. Experiments on the process of glass adhesive application demonstrat-ed the intuitiveness to use and effectiveness of the proposed framework in capturing human skills and transferring them to the robot.