 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Design Fabrication and Control of a Bioinspired Multimaterial Soft Robotic Hand
Aug 08, 2023Machines that mimic humans have inspired scientists for centuries. Bio-inspired soft robotic hands are a good example of such an endeavor, featuring intrinsic material compliance and continuous motion to deal with uncertainty and adapt to unstructured environments. Recent research led to impactful achievements in functional designs, modeling, fabrication, and control of soft robots. Nevertheless, the full realization of life-like movements is still challenging to achieve, often based on trial-and-error considerations from design to fabrication, consuming time and resources. In this study, a soft robotic hand is proposed, composed of soft actuator cores and an exoskeleton, featuring a multi-material design aided by finite element analysis (FEA) to define the hand geometry and promote finger's bendability. The actuators are fabricated using molding and the exoskeleton is 3D-printed in a single step. An ON-OFF controller keeps the set fingers' inner pressures related to specific bending angles, even in the presence of leaks. The FEA numerical results were validated by experimental tests, as well as the ability of the hand to grasp objects with different shapes, weights and sizes. This integrated solution will make soft robotic hands more available to people, at a reduced cost, avoiding the time-consuming design-fabrication trial-and-error processes.
Intuitive Robot Programming by Capturing Human Manufacturing Skills: A Framework for the Process of Glass Adhesive Application
Sep 15, 2022

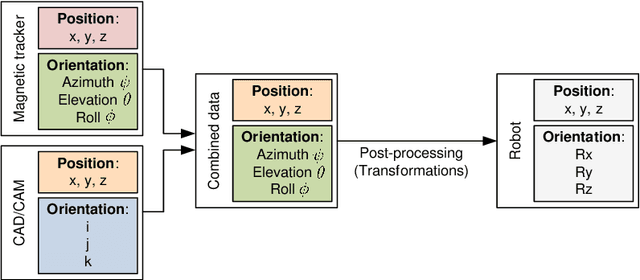
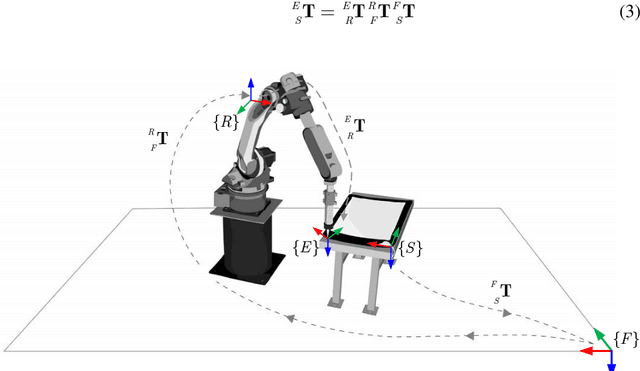
There is a great demand for the robotization of manufacturing processes fea-turing monotonous labor. Some manufacturing tasks requiring specific skills (welding, painting, etc.) suffer from a lack of workers. Robots have been used in these tasks, but their flexibility is limited since they are still difficult to program/re-program by non-experts, making them inaccessible to most companies. Robot offline programming (OLP) is reliable. However, generat-ed paths directly from CAD/CAM do not include relevant parameters repre-senting human skills such as robot end-effector orientations and velocities. This paper presents an intuitive robot programming system to capture human manufacturing skills and transform them into robot programs. Demonstra-tions from human skilled workers are recorded using a magnetic tracking system attached to the worker tools. Collected data include the orientations and velocity of the working paths. Positional data are extracted from CAD/CAM since its error when captured by the magnetic tracker, is signifi-cant. Paths poses are transformed in Cartesian space and validated in a simu-lation environment. Robot programs are generated and transferred to the real robot. Experiments on the process of glass adhesive application demonstrat-ed the intuitiveness to use and effectiveness of the proposed framework in capturing human skills and transferring them to the robot.