 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePACE: Prefix-Protected and Difficulty-Aware Compression for Efficient Reasoning
Feb 12, 2026Language Reasoning Models (LRMs) achieve strong performance by scaling test-time computation but often suffer from ``overthinking'', producing excessively long reasoning traces that increase latency and memory usage. Existing LRMs typically enforce conciseness with uniform length penalties, which over-compress crucial early deduction steps at the sequence level and indiscriminately penalize all queries at the group level. To solve these limitations, we propose \textbf{\model}, a dual-level framework for prefix-protected and difficulty-aware compression under hierarchical supervision. At the sequence level, prefix-protected optimization employs decaying mixed rollouts to maintain valid reasoning paths while promoting conciseness. At the group level, difficulty-aware penalty dynamically scales length constraints based on query complexity, maintaining exploration for harder questions while curbing redundancy on easier ones. Extensive experiments on DeepSeek-R1-Distill-Qwen (1.5B/7B) demonstrate that \model achieves a substantial reduction in token usage (up to \textbf{55.7\%}) while simultaneously improving accuracy (up to \textbf{4.1\%}) on math benchmarks, with generalization ability to code, science, and general domains.
Region-Point Joint Representation for Effective Trajectory Similarity Learning
Nov 17, 2025Recent learning-based methods have reduced the computational complexity of traditional trajectory similarity computation, but state-of-the-art (SOTA) methods still fail to leverage the comprehensive spectrum of trajectory information for similarity modeling. To tackle this problem, we propose \textbf{RePo}, a novel method that jointly encodes \textbf{Re}gion-wise and \textbf{Po}int-wise features to capture both spatial context and fine-grained moving patterns. For region-wise representation, the GPS trajectories are first mapped to grid sequences, and spatial context are captured by structural features and semantic context enriched by visual features. For point-wise representation, three lightweight expert networks extract local, correlation, and continuous movement patterns from dense GPS sequences. Then, a router network adaptively fuses the learned point-wise features, which are subsequently combined with region-wise features using cross-attention to produce the final trajectory embedding. To train RePo, we adopt a contrastive loss with hard negative samples to provide similarity ranking supervision. Experiment results show that RePo achieves an average accuracy improvement of 22.2\% over SOTA baselines across all evaluation metrics.
Blurred Encoding for Trajectory Representation Learning
Nov 12, 2025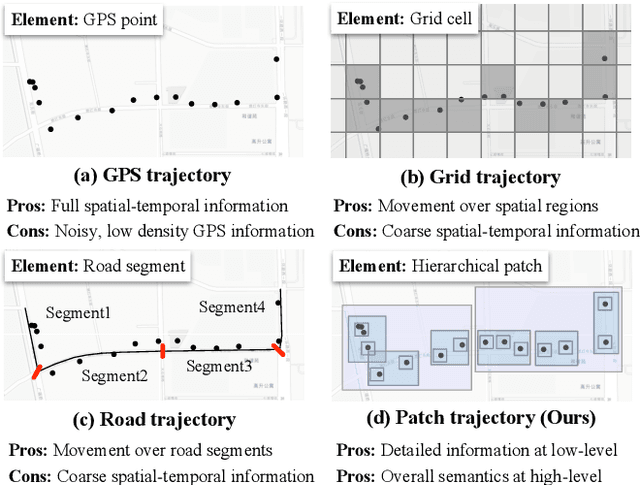

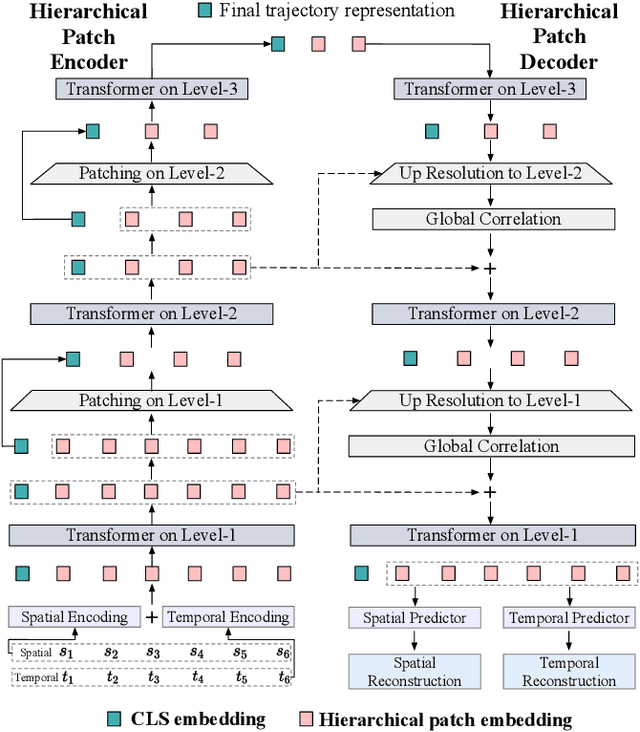
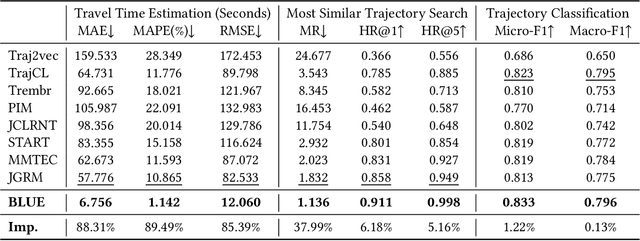
Trajectory representation learning (TRL) maps trajectories to vector embeddings and facilitates tasks such as trajectory classification and similarity search. State-of-the-art (SOTA) TRL methods transform raw GPS trajectories to grid or road trajectories to capture high-level travel semantics, i.e., regions and roads. However, they lose fine-grained spatial-temporal details as multiple GPS points are grouped into a single grid cell or road segment. To tackle this problem, we propose the BLUrred Encoding method, dubbed BLUE, which gradually reduces the precision of GPS coordinates to create hierarchical patches with multiple levels. The low-level patches are small and preserve fine-grained spatial-temporal details, while the high-level patches are large and capture overall travel patterns. To complement different patch levels with each other, our BLUE is an encoder-decoder model with a pyramid structure. At each patch level, a Transformer is used to learn the trajectory embedding at the current level, while pooling prepares inputs for the higher level in the encoder, and up-resolution provides guidance for the lower level in the decoder. BLUE is trained using the trajectory reconstruction task with the MSE loss. We compare BLUE with 8 SOTA TRL methods for 3 downstream tasks, the results show that BLUE consistently achieves higher accuracy than all baselines, outperforming the best-performing baselines by an average of 30.90%. Our code is available at https://github.com/slzhou-xy/BLUE.
Grid and Road Expressions Are Complementary for Trajectory Representation Learning
Nov 22, 2024



Trajectory representation learning (TRL) maps trajectories to vectors that can be used for many downstream tasks. Existing TRL methods use either grid trajectories, capturing movement in free space, or road trajectories, capturing movement in a road network, as input. We observe that the two types of trajectories are complementary, providing either region and location information or providing road structure and movement regularity. Therefore, we propose a novel multimodal TRL method, dubbed GREEN, to jointly utilize Grid and Road trajectory Expressions for Effective representatioN learning. In particular, we transform raw GPS trajectories into both grid and road trajectories and tailor two encoders to capture their respective information. To align the two encoders such that they complement each other, we adopt a contrastive loss to encourage them to produce similar embeddings for the same raw trajectory and design a mask language model (MLM) loss to use grid trajectories to help reconstruct masked road trajectories. To learn the final trajectory representation, a dual-modal interactor is used to fuse the outputs of the two encoders via cross-attention. We compare GREEN with 7 state-of-the-art TRL methods for 3 downstream tasks, finding that GREEN consistently outperforms all baselines and improves the accuracy of the best-performing baseline by an average of 15.99\%.
RED: Effective Trajectory Representation Learning with Comprehensive Information
Nov 22, 2024



Trajectory representation learning (TRL) maps trajectories to vectors that can then be used for various downstream tasks, including trajectory similarity computation, trajectory classification, and travel-time estimation. However, existing TRL methods often produce vectors that, when used in downstream tasks, yield insufficiently accurate results. A key reason is that they fail to utilize the comprehensive information encompassed by trajectories. We propose a self-supervised TRL framework, called RED, which effectively exploits multiple types of trajectory information. Overall, RED adopts the Transformer as the backbone model and masks the constituting paths in trajectories to train a masked autoencoder (MAE). In particular, RED considers the moving patterns of trajectories by employing a Road-aware masking strategy} that retains key paths of trajectories during masking, thereby preserving crucial information of the trajectories. RED also adopts a spatial-temporal-user joint Embedding scheme to encode comprehensive information when preparing the trajectories as model inputs. To conduct training, RED adopts Dual-objective task learning}: the Transformer encoder predicts the next segment in a trajectory, and the Transformer decoder reconstructs the entire trajectory. RED also considers the spatial-temporal correlations of trajectories by modifying the attention mechanism of the Transformer. We compare RED with 9 state-of-the-art TRL methods for 4 downstream tasks on 3 real-world datasets, finding that RED can usually improve the accuracy of the best-performing baseline by over 5%.