 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Evaluation of a Compact 3D End-effector Assistive Robot for Adaptive Arm Support
Apr 04, 2024



We developed a 3D end-effector type of upper limb assistive robot, named as Assistive Robotic Arm Extender (ARAE), that provides transparency movement and adaptive arm support control to achieve home-based therapy and training in the real environment. The proposed system composes five degrees of freedom, including three active motors and two passive joints at the end-effector module. The core structure of the system is based on a parallel mechanism. The kinematic and dynamic modeling are illustrated in detail. The proposed adaptive arm support control framework calculates the compensated force based on the estimated human arm posture in 3D space. It firstly estimates human arm joint angles using two proposed methods: fixed torso and sagittal plane models without using external sensors such as IMUs, magnetic sensors, or depth cameras. The experiments were carried out to evaluate the performance of the two proposed angle estimation methods. Then, the estimated human joint angles were input into the human upper limb dynamics model to derive the required support force generated by the robot. The muscular activities were measured to evaluate the effects of the proposed framework. The obvious reduction of muscular activities was exhibited when participants were tested with the ARAE under an adaptive arm gravity compensation control framework. The overall results suggest that the ARAE system, when combined with the proposed control framework, has the potential to offer adaptive arm support. This integration could enable effective training with Activities of Daily Living (ADLs) and interaction with real environments.
Binary output layer of feedforward neural networks for solving multi-class classification problems
Jan 22, 2018



Considered in this short note is the design of output layer nodes of feedforward neural networks for solving multi-class classification problems with r (bigger than or equal to 3) classes of samples. The common and conventional setting of output layer, called "one-to-one approach" in this paper, is as follows: The output layer contains r output nodes corresponding to the r classes. And for an input sample of the i-th class, the ideal output is 1 for the i-th output node, and 0 for all the other output nodes. We propose in this paper a new "binary approach": Suppose r is (2^(q minus 1), 2^q] with q bigger than or equal to 2, then we let the output layer contain q output nodes, and let the ideal outputs for the r classes be designed in a binary manner. Numerical experiments carried out in this paper show that our binary approach does equally good job as, but uses less output nodes than, the traditional one-to-one approach.
Extreme Learning Machine with Local Connections
Jan 22, 2018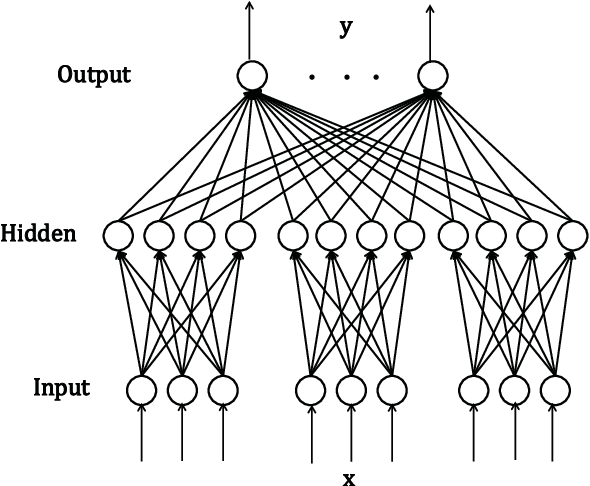
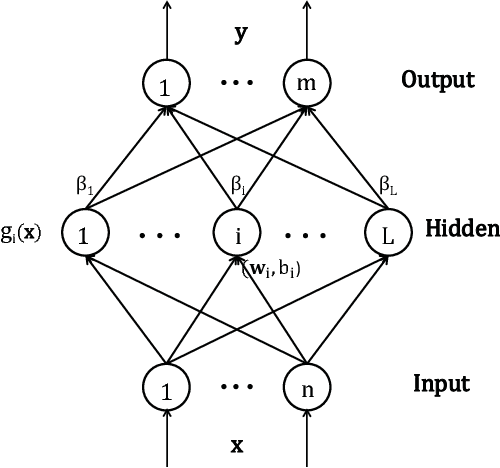
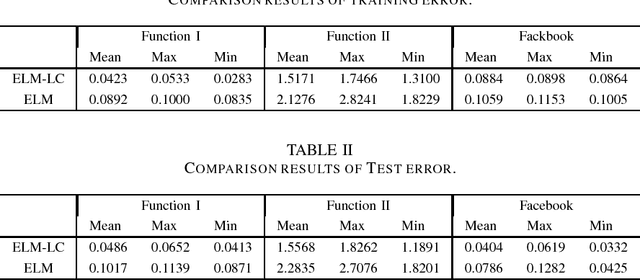
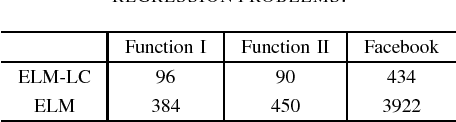
This paper is concerned with the sparsification of the input-hidden weights of ELM (Extreme Learning Machine). For ordinary feedforward neural networks, the sparsification is usually done by introducing certain regularization technique into the learning process of the network. But this strategy can not be applied for ELM, since the input-hidden weights of ELM are supposed to be randomly chosen rather than to be learned. To this end, we propose a modified ELM, called ELM-LC (ELM with local connections), which is designed for the sparsification of the input-hidden weights as follows: The hidden nodes and the input nodes are divided respectively into several corresponding groups, and an input node group is fully connected with its corresponding hidden node group, but is not connected with any other hidden node group. As in the usual ELM, the hidden-input weights are randomly given, and the hidden-output weights are obtained through a least square learning. In the numerical simulations on some benchmark problems, the new ELM-CL behaves better than the traditional ELM.