 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Scene Understanding at Urban Intersection using Stereo Vision and Digital Map
Dec 10, 2021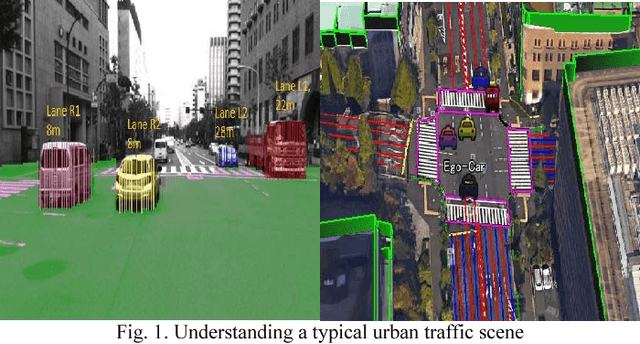
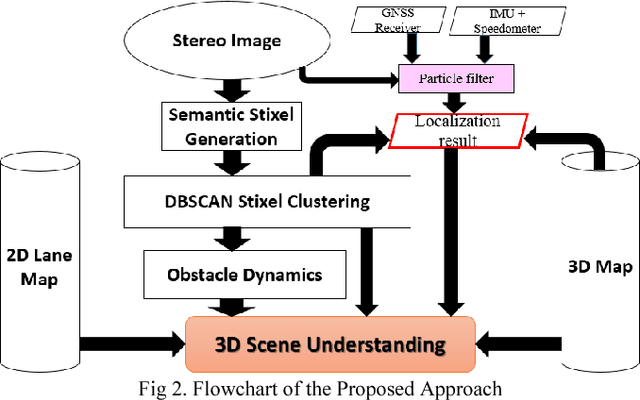
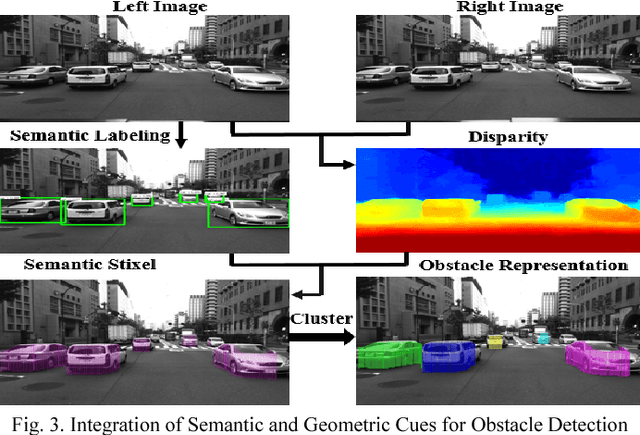
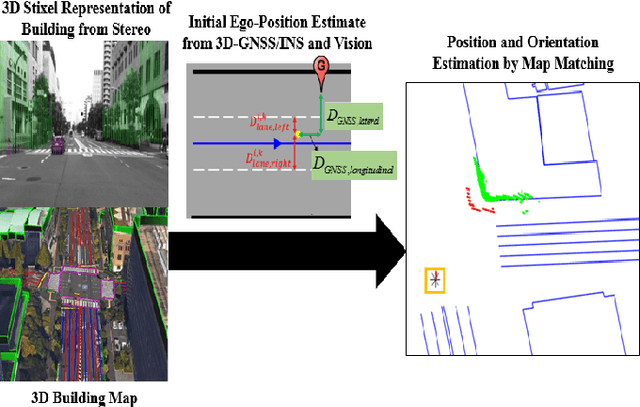
The driving behavior at urban intersections is very complex. It is thus crucial for autonomous vehicles to comprehensively understand challenging urban traffic scenes in order to navigate intersections and prevent accidents. In this paper, we introduce a stereo vision and 3D digital map based approach to spatially and temporally analyze the traffic situation at urban intersections. Stereo vision is used to detect, classify and track obstacles, while a 3D digital map is used to improve ego-localization and provide context in terms of road-layout information. A probabilistic approach that temporally integrates these geometric, semantic, dynamic and contextual cues is presented. We qualitatively and quantitatively evaluate our proposed technique on real traffic data collected at an urban canyon in Tokyo to demonstrate the efficacy of the system in providing comprehensive awareness of the traffic surroundings.
* 6 pages, 6 figures
How far should self-driving cars see? Effect of observation range on vehicle self-localization
Aug 19, 2019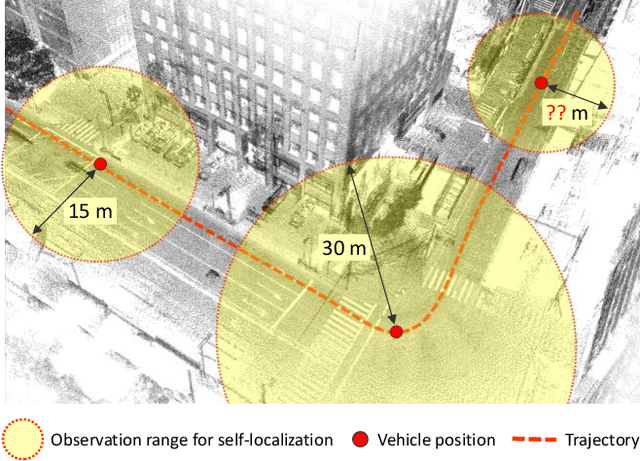
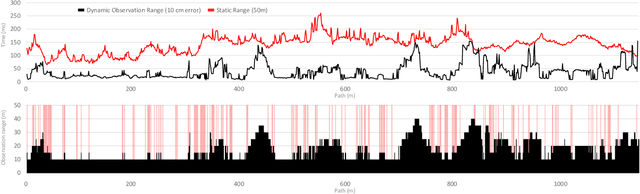


Accuracy and time efficiency are two essential requirements for the self-localization of autonomous vehicles. While the observation range considered for simultaneous localization and mapping (SLAM) has a significant effect on both accuracy and computation time, its effect is not well investigated in the literature. In this paper, we will answer the question: How far should a driverless car observe during self-localization? We introduce a framework to dynamically define the observation range for localization to meet the accuracy requirement for autonomous driving, while keeping the computation time low. To model the effect of scanning range on the localization accuracy for every point on the map, several map factors were employed. The capability of the proposed framework was verified using field data, demonstrating that it is able to improve the average matching time from 142.2 ms to 39.3 ms while keeping the localization accuracy around 8.1 cm.
Unsupervised Submodular Rank Aggregation on Score-based Permutations
Sep 06, 2017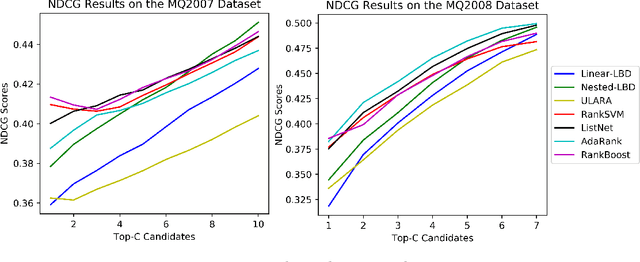
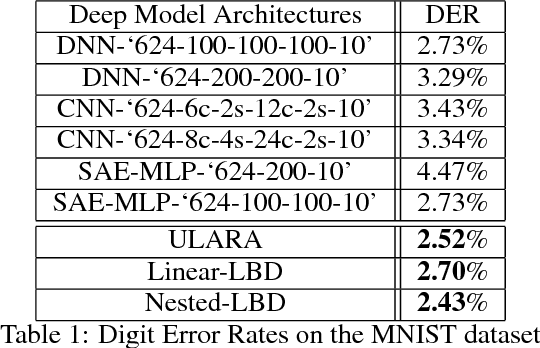
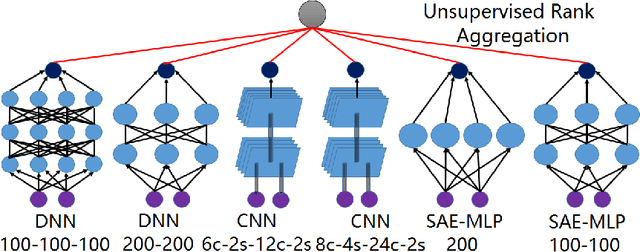
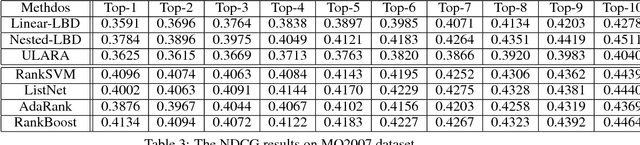
Unsupervised rank aggregation on score-based permutations, which is widely used in many applications, has not been deeply explored yet. This work studies the use of submodular optimization for rank aggregation on score-based permutations in an unsupervised way. Specifically, we propose an unsupervised approach based on the Lovasz Bregman divergence for setting up linear structured convex and nested structured concave objective functions. In addition, stochastic optimization methods are applied in the training process and efficient algorithms for inference can be guaranteed. The experimental results from Information Retrieval, Combining Distributed Neural Networks, Influencers in Social Networks, and Distributed Automatic Speech Recognition tasks demonstrate the effectiveness of the proposed methods.