 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Instance Segmentation of MVS Buildings
Dec 18, 2021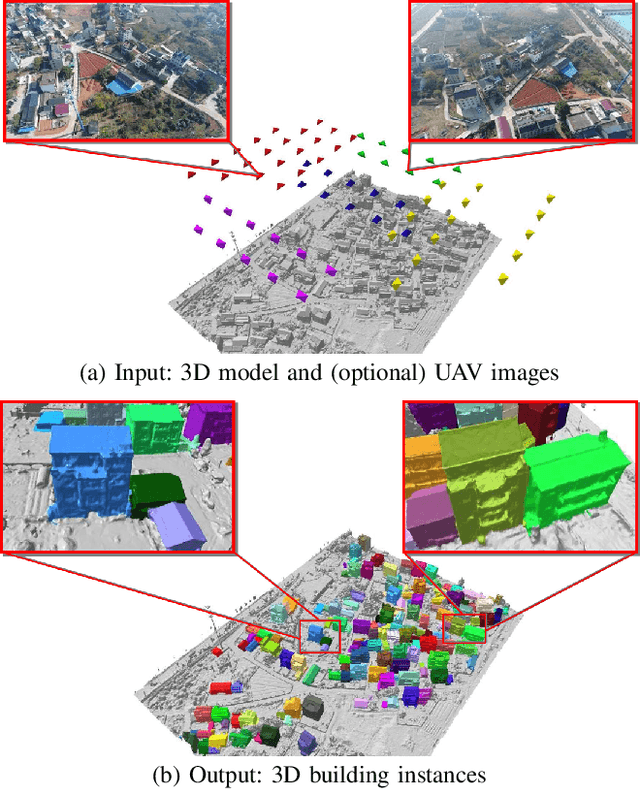
We present a novel framework for instance segmentation of 3D buildings from Multi-view Stereo (MVS) urban scenes. Unlike existing works focusing on semantic segmentation of an urban scene, the emphasis of this work lies in detecting and segmenting 3D building instances even if they are attached and embedded in a large and imprecise 3D surface model. Multi-view RGB images are first enhanced to RGBH images by adding a heightmap and are segmented to obtain all roof instances using a fine-tuned 2D instance segmentation neural network. Roof instance masks from different multi-view images are then clustered into global masks. Our mask clustering accounts for spatial occlusion and overlapping, which can eliminate segmentation ambiguities among multi-view images. Based on these global masks, 3D roof instances are segmented out by mask back-projections and extended to the entire building instances through a Markov random field (MRF) optimization. Quantitative evaluations and ablation studies have shown the effectiveness of all major steps of the method. A dataset for the evaluation of instance segmentation of 3D building models is provided as well. To the best of our knowledge, it is the first dataset for 3D urban buildings on the instance segmentation level.
An effective coaxiality error measurement for twist drill based on line structured light sensor
Dec 18, 2021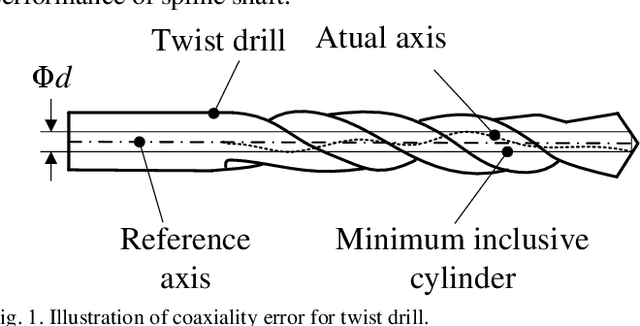
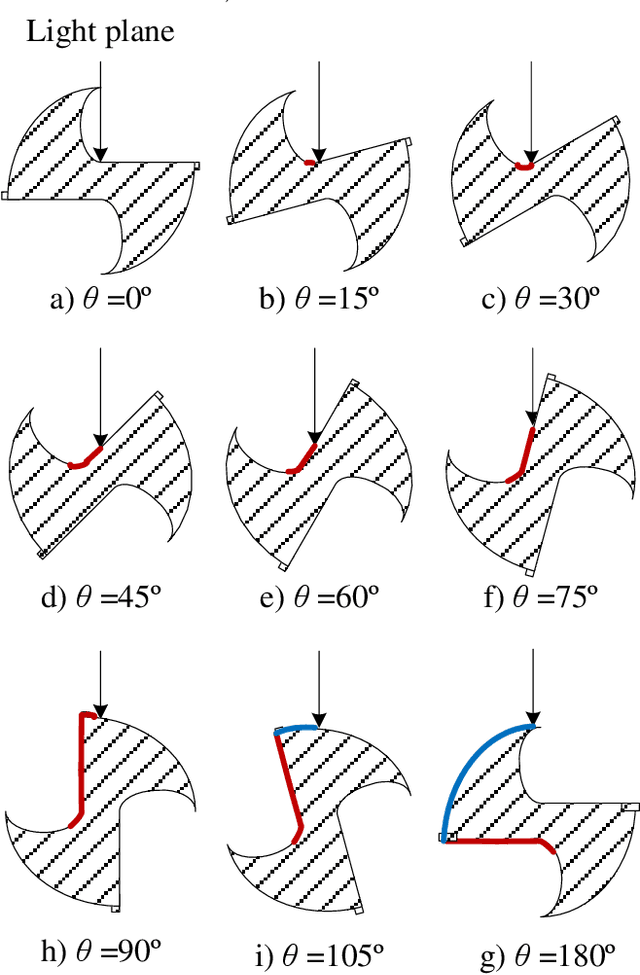
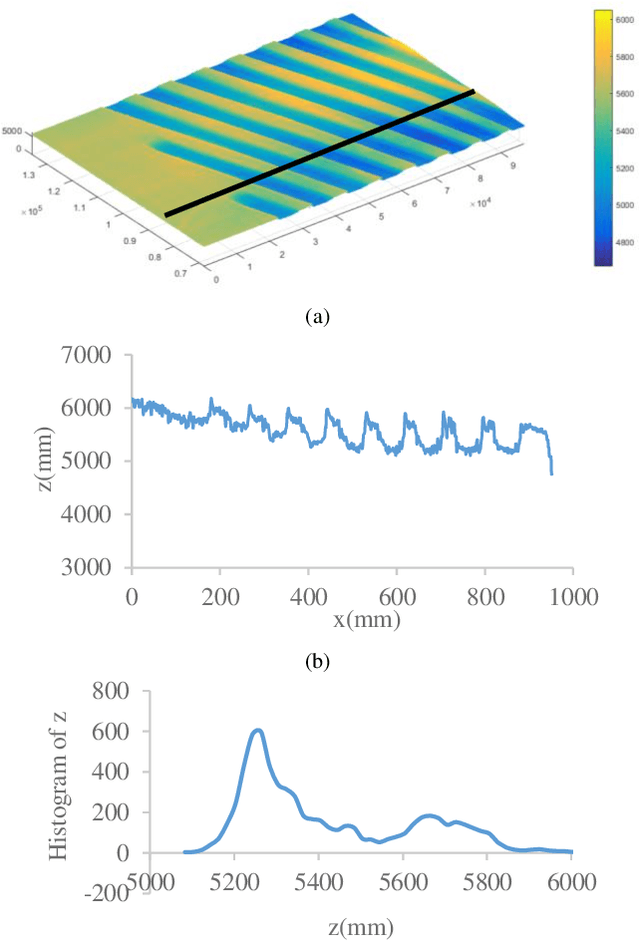
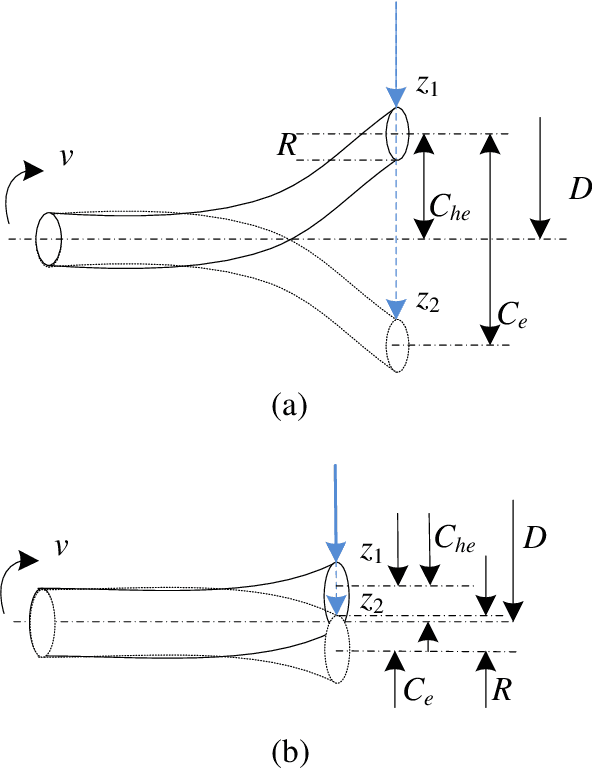
Since the structure of twist drill is complex, it is hard and challenging for its coaxiality error measurement. In this paper, a novel mechanism, framework and method of coaxiality error measurement for twist drill is proposed. The mechanism includes encoder, PLC controller, line structured sensor and high precision turntable. First, profile point cloud data of the twist drill is collected through the line structured light sensor when the drill turns around in the controlling of PLC. Second, a GMM-based point cloud segmentation algorithm based on local depth features is investigated to extract blade back data. To improve the measurement accuracy, a statistical filter is designed to remove outliers during the target region extraction. Then, according to two characteristics of coaxiality error, an axis reconstruction method based on orthogonal synthesis of axisymmetric contour differences is presented, which is facilitated to pre-position the maximum deviation cross sections of the drill axis. Finally, the coaxiality error is measured through fitting the benchmark axis and the axis at the pre-positioned maximum deviation position. At the end, a large number of experiments are carried out, and it shows that our method is accuracy and robust.