 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn effective coaxiality error measurement for twist drill based on line structured light sensor
Paper and Code
Dec 18, 2021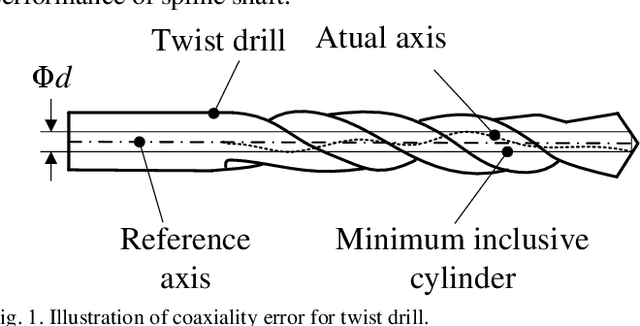
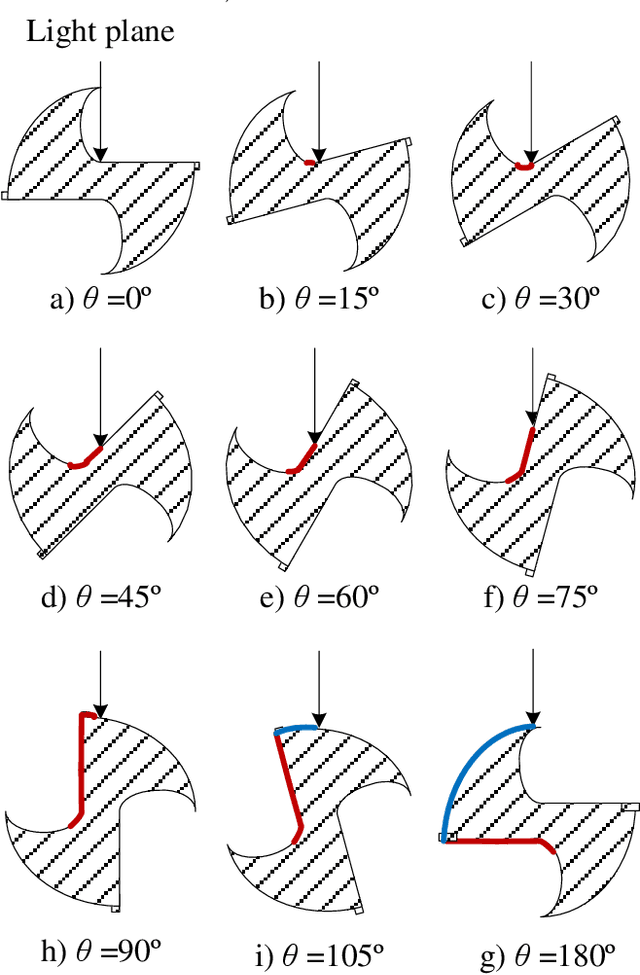
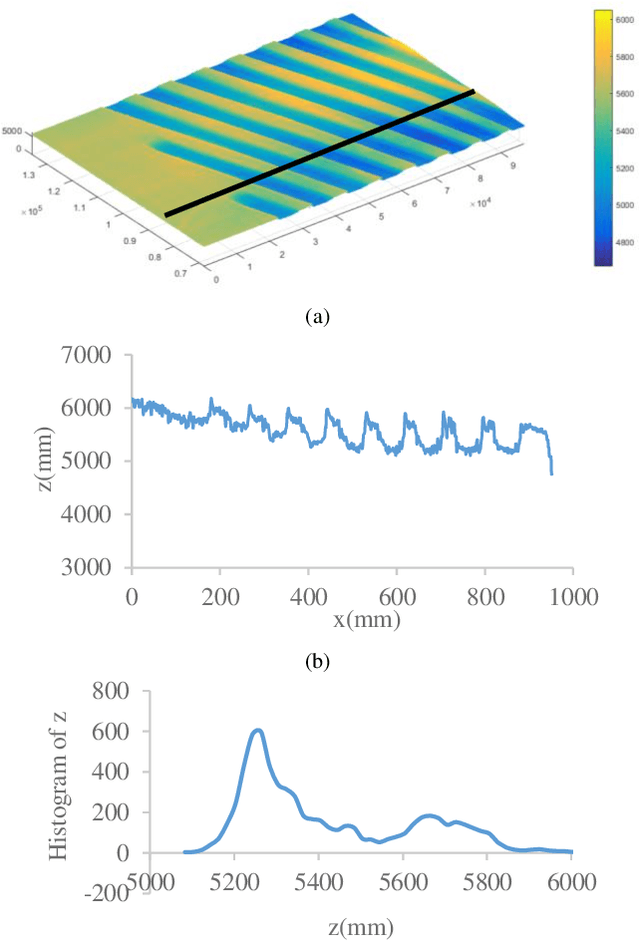
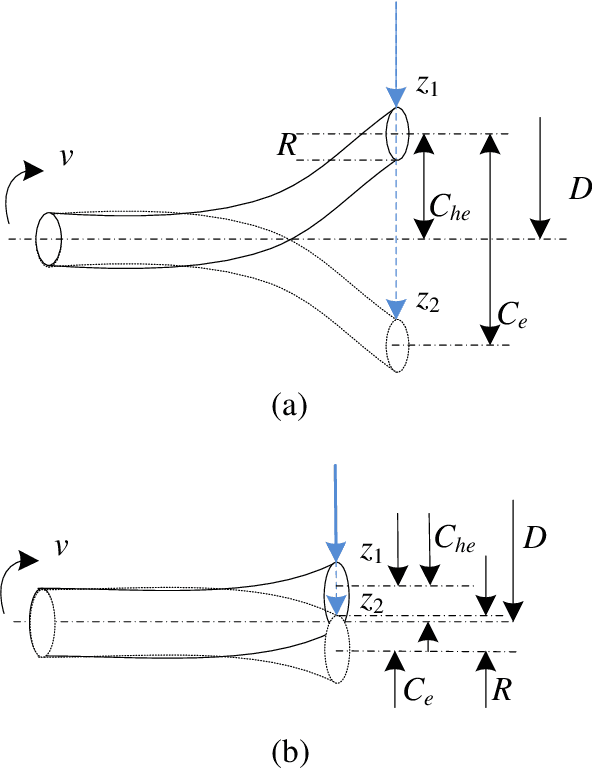
Since the structure of twist drill is complex, it is hard and challenging for its coaxiality error measurement. In this paper, a novel mechanism, framework and method of coaxiality error measurement for twist drill is proposed. The mechanism includes encoder, PLC controller, line structured sensor and high precision turntable. First, profile point cloud data of the twist drill is collected through the line structured light sensor when the drill turns around in the controlling of PLC. Second, a GMM-based point cloud segmentation algorithm based on local depth features is investigated to extract blade back data. To improve the measurement accuracy, a statistical filter is designed to remove outliers during the target region extraction. Then, according to two characteristics of coaxiality error, an axis reconstruction method based on orthogonal synthesis of axisymmetric contour differences is presented, which is facilitated to pre-position the maximum deviation cross sections of the drill axis. Finally, the coaxiality error is measured through fitting the benchmark axis and the axis at the pre-positioned maximum deviation position. At the end, a large number of experiments are carried out, and it shows that our method is accuracy and robust.