 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModalPatch: A Plug-and-Play Module for Robust Multi-Modal 3D Object Detection under Modality Drop
Mar 03, 2026Multi-modal 3D object detection is pivotal for autonomous driving, integrating complementary sensors like LiDAR and cameras. However, its real-world reliability is challenged by transient data interruptions and missing, where modalities can momentarily drop due to hardware glitches, adverse weather, or occlusions. This poses a critical risk, especially during a simultaneous modality drop, where the vehicle is momentarily blind. To address this problem, we introduce ModalPatch, the first plug-and-play module designed to enable robust detection under arbitrary modality-drop scenarios. Without requiring architectural changes or retraining, ModalPatch can be seamlessly integrated into diverse detection frameworks. Technically, ModalPatch leverages the temporal nature of sensor data for perceptual continuity, using a history-based module to predict and compensate for transiently unavailable features. To improve the fidelity of the predicted features, we further introduce an uncertainty-guided cross-modality fusion strategy that dynamically estimates the reliability of compensated features, suppressing biased signals while reinforcing informative ones. Extensive experiments show that ModalPatch consistently enhances both robustness and accuracy of state-of-the-art 3D object detectors under diverse modality-drop conditions.
The RoboSense Challenge: Sense Anything, Navigate Anywhere, Adapt Across Platforms
Jan 08, 2026Autonomous systems are increasingly deployed in open and dynamic environments -- from city streets to aerial and indoor spaces -- where perception models must remain reliable under sensor noise, environmental variation, and platform shifts. However, even state-of-the-art methods often degrade under unseen conditions, highlighting the need for robust and generalizable robot sensing. The RoboSense 2025 Challenge is designed to advance robustness and adaptability in robot perception across diverse sensing scenarios. It unifies five complementary research tracks spanning language-grounded decision making, socially compliant navigation, sensor configuration generalization, cross-view and cross-modal correspondence, and cross-platform 3D perception. Together, these tasks form a comprehensive benchmark for evaluating real-world sensing reliability under domain shifts, sensor failures, and platform discrepancies. RoboSense 2025 provides standardized datasets, baseline models, and unified evaluation protocols, enabling large-scale and reproducible comparison of robust perception methods. The challenge attracted 143 teams from 85 institutions across 16 countries, reflecting broad community engagement. By consolidating insights from 23 winning solutions, this report highlights emerging methodological trends, shared design principles, and open challenges across all tracks, marking a step toward building robots that can sense reliably, act robustly, and adapt across platforms in real-world environments.
From Dataset to Real-world: General 3D Object Detection via Generalized Cross-domain Few-shot Learning
Mar 08, 2025LiDAR-based 3D object detection datasets have been pivotal for autonomous driving, yet they cover a limited range of objects, restricting the model's generalization across diverse deployment environments. To address this, we introduce the first generalized cross-domain few-shot (GCFS) task in 3D object detection, which focuses on adapting a source-pretrained model for high performance on both common and novel classes in a target domain with few-shot samples. Our solution integrates multi-modal fusion and contrastive-enhanced prototype learning within one framework, holistically overcoming challenges related to data scarcity and domain adaptation in the GCFS setting. The multi-modal fusion module utilizes 2D vision-language models to extract rich, open-set semantic knowledge. To address biases in point distributions across varying structural complexities, we particularly introduce a physically-aware box searching strategy that leverages laser imaging principles to generate high-quality 3D box proposals from 2D insights, enhancing object recall. To effectively capture domain-specific representations for each class from limited target data, we further propose a contrastive-enhanced prototype learning, which strengthens the model's adaptability. We evaluate our approach with three GCFS benchmark settings, and extensive experiments demonstrate the effectiveness of our solution for GCFS tasks. The code will be publicly available.
Domain Generalization of 3D Object Detection by Density-Resampling
Nov 17, 2023



Point-cloud-based 3D object detection suffers from performance degradation when encountering data with novel domain gaps. To tackle it, the single-domain generalization (SDG) aims to generalize the detection model trained in a limited single source domain to perform robustly on unexplored domains. In this paper, we propose an SDG method to improve the generalizability of 3D object detection to unseen target domains. Unlike prior SDG works for 3D object detection solely focusing on data augmentation, our work introduces a novel data augmentation method and contributes a new multi-task learning strategy in the methodology. Specifically, from the perspective of data augmentation, we design a universal physical-aware density-based data augmentation (PDDA) method to mitigate the performance loss stemming from diverse point densities. From the learning methodology viewpoint, we develop a multi-task learning for 3D object detection: during source training, besides the main standard detection task, we leverage an auxiliary self-supervised 3D scene restoration task to enhance the comprehension of the encoder on background and foreground details for better recognition and detection of objects. Furthermore, based on the auxiliary self-supervised task, we propose the first test-time adaptation method for domain generalization of 3D object detection, which efficiently adjusts the encoder's parameters to adapt to unseen target domains during testing time, to further bridge domain gaps. Extensive cross-dataset experiments covering "Car", "Pedestrian", and "Cyclist" detections, demonstrate our method outperforms state-of-the-art SDG methods and even overpass unsupervised domain adaptation methods under some circumstances. The code will be made publicly available.
MyriadAL: Active Few Shot Learning for Histopathology
Oct 24, 2023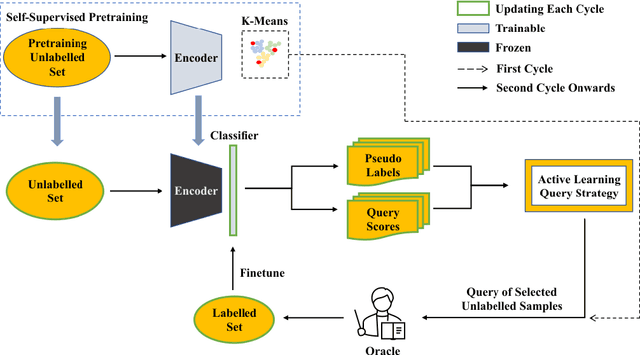

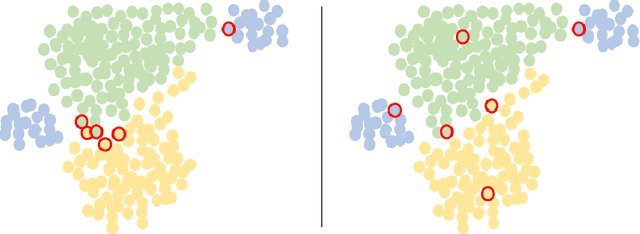
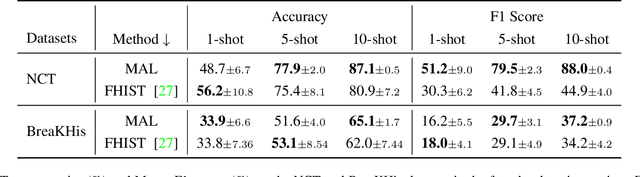
Active Learning (AL) and Few Shot Learning (FSL) are two label-efficient methods which have achieved excellent results recently. However, most prior arts in both learning paradigms fail to explore the wealth of the vast unlabelled data. In this study, we address this issue in the scenario where the annotation budget is very limited, yet a large amount of unlabelled data for the target task is available. We frame this work in the context of histopathology where labelling is prohibitively expensive. To this end, we introduce an active few shot learning framework, Myriad Active Learning (MAL), including a contrastive-learning encoder, pseudo-label generation, and novel query sample selection in the loop. Specifically, we propose to massage unlabelled data in a self-supervised manner, where the obtained data representations and clustering knowledge form the basis to activate the AL loop. With feedback from the oracle in each AL cycle, the pseudo-labels of the unlabelled data are refined by optimizing a shallow task-specific net on top of the encoder. These updated pseudo-labels serve to inform and improve the active learning query selection process. Furthermore, we introduce a novel recipe to combine existing uncertainty measures and utilize the entire uncertainty list to reduce sample redundancy in AL. Extensive experiments on two public histopathology datasets show that MAL has superior test accuracy, macro F1-score, and label efficiency compared to prior works, and can achieve a comparable test accuracy to a fully supervised algorithm while labelling only 5% of the dataset.
Common Corruption Robustness of Point Cloud Detectors: Benchmark and Enhancement
Oct 12, 2022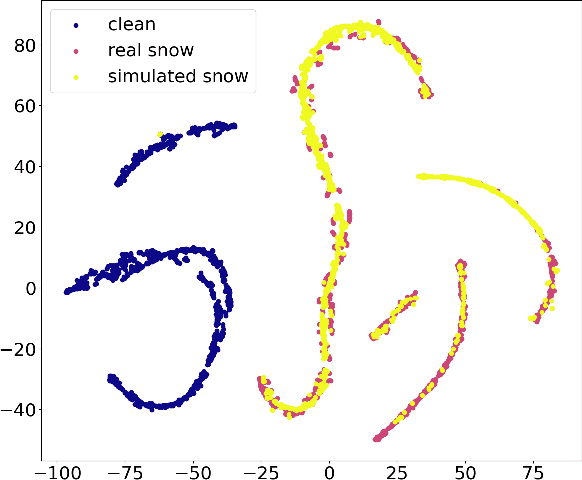
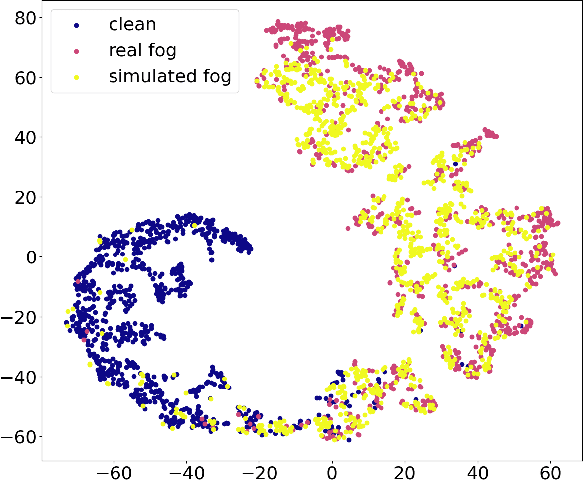
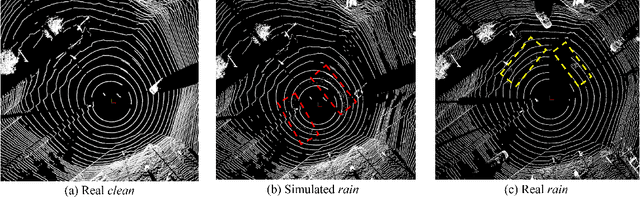
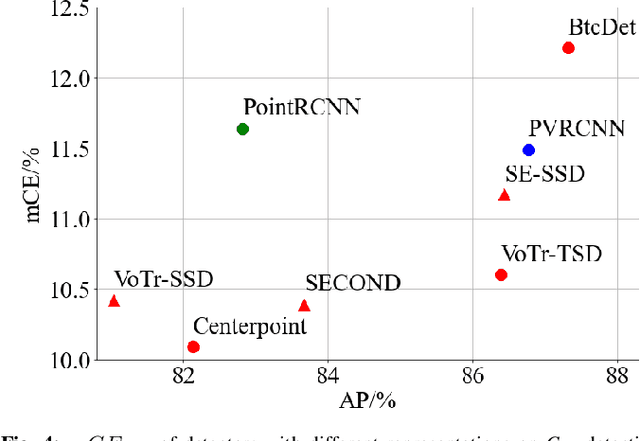
Object detection through LiDAR-based point cloud has recently been important in autonomous driving. Although achieving high accuracy on public benchmarks, the state-of-the-art detectors may still go wrong and cause a heavy loss due to the widespread corruptions in the real world like rain, snow, sensor noise, etc. Nevertheless, there is a lack of a large-scale dataset covering diverse scenes and realistic corruption types with different severities to develop practical and robust point cloud detectors, which is challenging due to the heavy collection costs. To alleviate the challenge and start the first step for robust point cloud detection, we propose the physical-aware simulation methods to generate degraded point clouds under different real-world common corruptions. Then, for the first attempt, we construct a benchmark based on the physical-aware common corruptions for point cloud detectors, which contains a total of 1,122,150 examples covering 7,481 scenes, 25 common corruption types, and 6 severities. With such a novel benchmark, we conduct extensive empirical studies on 8 state-of-the-art detectors that contain 6 different detection frameworks. Thus we get several insight observations revealing the vulnerabilities of the detectors and indicating the enhancement directions. Moreover, we further study the effectiveness of existing robustness enhancement methods based on data augmentation and data denoising. The benchmark can potentially be a new platform for evaluating point cloud detectors, opening a door for developing novel robustness enhancement methods.