 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Real-world BEV Perception: Depth Uncertainty Estimation via Gaussian Splatting
Apr 03, 2025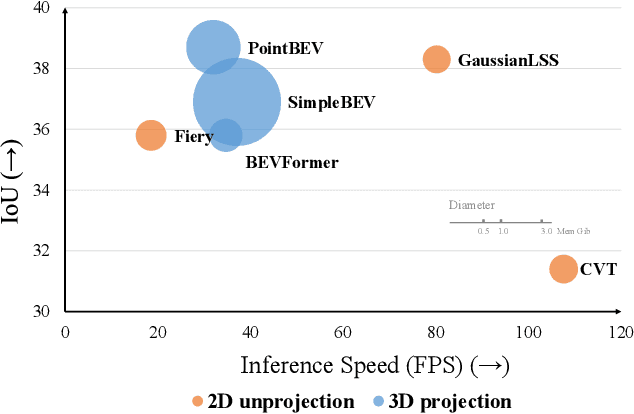



Bird's-eye view (BEV) perception has gained significant attention because it provides a unified representation to fuse multiple view images and enables a wide range of down-stream autonomous driving tasks, such as forecasting and planning. Recent state-of-the-art models utilize projection-based methods which formulate BEV perception as query learning to bypass explicit depth estimation. While we observe promising advancements in this paradigm, they still fall short of real-world applications because of the lack of uncertainty modeling and expensive computational requirement. In this work, we introduce GaussianLSS, a novel uncertainty-aware BEV perception framework that revisits unprojection-based methods, specifically the Lift-Splat-Shoot (LSS) paradigm, and enhances them with depth un-certainty modeling. GaussianLSS represents spatial dispersion by learning a soft depth mean and computing the variance of the depth distribution, which implicitly captures object extents. We then transform the depth distribution into 3D Gaussians and rasterize them to construct uncertainty-aware BEV features. We evaluate GaussianLSS on the nuScenes dataset, achieving state-of-the-art performance compared to unprojection-based methods. In particular, it provides significant advantages in speed, running 2.5x faster, and in memory efficiency, using 0.3x less memory compared to projection-based methods, while achieving competitive performance with only a 0.4% IoU difference.
Potential Field as Scene Affordance for Behavior Change-Based Visual Risk Object Identification
Sep 24, 2024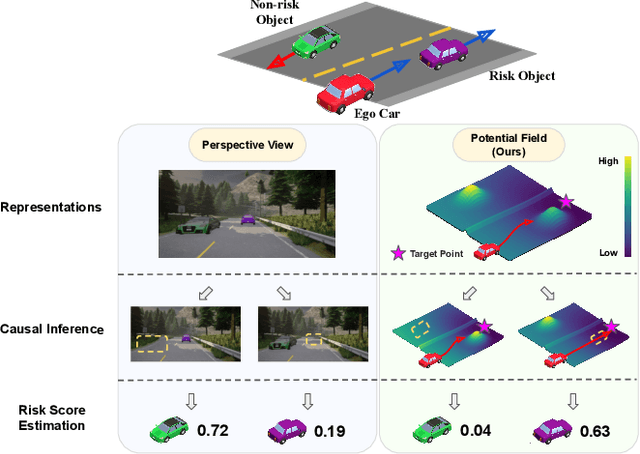
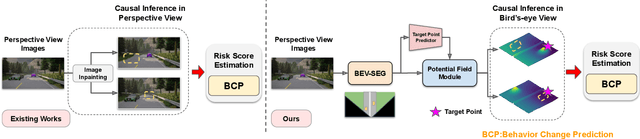
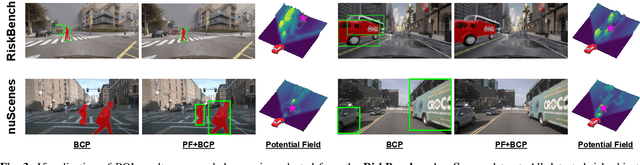
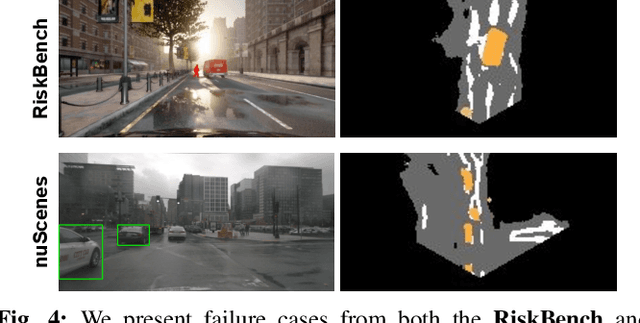
We study behavior change-based visual risk object identification (Visual-ROI), a critical framework designed to detect potential hazards for intelligent driving systems. Existing methods often show significant limitations in spatial accuracy and temporal consistency, stemming from an incomplete understanding of scene affordance. For example, these methods frequently misidentify vehicles that do not impact the ego vehicle as risk objects. Furthermore, existing behavior change-based methods are inefficient because they implement causal inference in the perspective image space. We propose a new framework with a Bird's Eye View (BEV) representation to overcome the above challenges. Specifically, we utilize potential fields as scene affordance, involving repulsive forces derived from road infrastructure and traffic participants, along with attractive forces sourced from target destinations. In this work, we compute potential fields by assigning different energy levels according to the semantic labels obtained from BEV semantic segmentation. We conduct thorough experiments and ablation studies, comparing the proposed method with various state-of-the-art algorithms on both synthetic and real-world datasets. Our results show a notable increase in spatial and temporal consistency, with enhancements of 20.3% and 11.6% on the RiskBench dataset, respectively. Additionally, we can improve computational efficiency by 88%. We achieve improvements of 5.4% in spatial accuracy and 7.2% in temporal consistency on the nuScenes dataset.
RiskBench: A Scenario-based Benchmark for Risk Identification
Dec 04, 2023Intelligent driving systems aim to achieve a zero-collision mobility experience, requiring interdisciplinary efforts to enhance safety performance. This work focuses on risk identification, the process of identifying and analyzing risks stemming from dynamic traffic participants and unexpected events. While significant advances have been made in the community, the current evaluation of different risk identification algorithms uses independent datasets, leading to difficulty in direct comparison and hindering collective progress toward safety performance enhancement. To address this limitation, we introduce \textbf{RiskBench}, a large-scale scenario-based benchmark for risk identification. We design a scenario taxonomy and augmentation pipeline to enable a systematic collection of ground truth risks under diverse scenarios. We assess the ability of ten algorithms to (1) detect and locate risks, (2) anticipate risks, and (3) facilitate decision-making. We conduct extensive experiments and summarize future research on risk identification. Our aim is to encourage collaborative endeavors in achieving a society with zero collisions. We have made our dataset and benchmark toolkit publicly on the project page: https://hcis-lab.github.io/RiskBench/
Action-slot: Visual Action-centric Representations for Multi-label Atomic Activity Recognition in Traffic Scenes
Nov 29, 2023

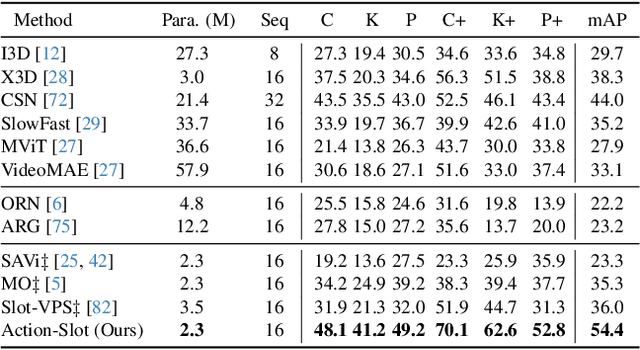

In this paper, we study multi-label atomic activity recognition. Despite the notable progress in action recognition, it is still challenging to recognize atomic activities due to a deficiency in a holistic understanding of both multiple road users' motions and their contextual information. In this paper, we introduce Action-slot, a slot attention-based approach that learns visual action-centric representations, capturing both motion and contextual information. Our key idea is to design action slots that are capable of paying attention to regions where atomic activities occur, without the need for explicit perception guidance. To further enhance slot attention, we introduce a background slot that competes with action slots, aiding the training process in avoiding unnecessary focus on background regions devoid of activities. Yet, the imbalanced class distribution in the existing dataset hampers the assessment of rare activities. To address the limitation, we collect a synthetic dataset called TACO, which is four times larger than OATS and features a balanced distribution of atomic activities. To validate the effectiveness of our method, we conduct comprehensive experiments and ablation studies against various action recognition baselines. We also show that the performance of multi-label atomic activity recognition on real-world datasets can be improved by pretraining representations on TACO. We will release our source code and dataset. See the videos of visualization on the project page: https://hcis-lab.github.io/Action-slot/