 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePotential Field as Scene Affordance for Behavior Change-Based Visual Risk Object Identification
Sep 24, 2024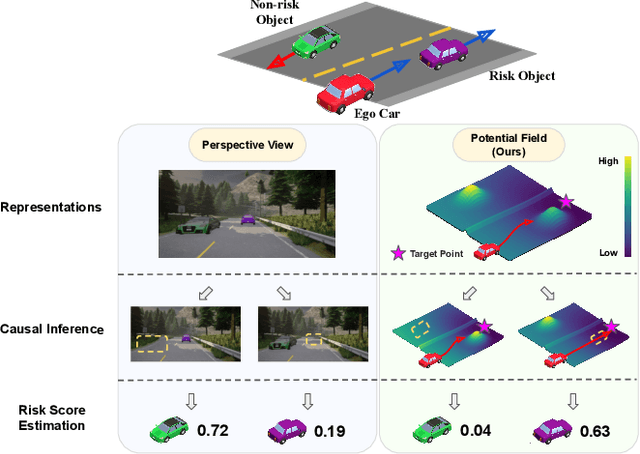
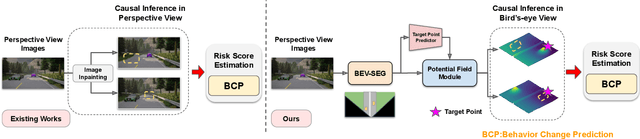
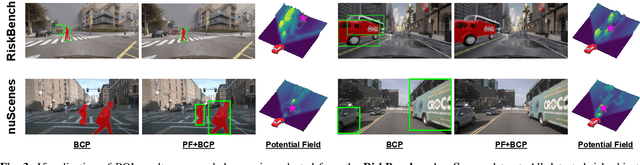
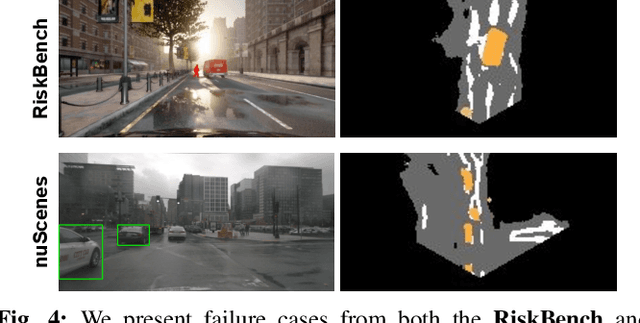
We study behavior change-based visual risk object identification (Visual-ROI), a critical framework designed to detect potential hazards for intelligent driving systems. Existing methods often show significant limitations in spatial accuracy and temporal consistency, stemming from an incomplete understanding of scene affordance. For example, these methods frequently misidentify vehicles that do not impact the ego vehicle as risk objects. Furthermore, existing behavior change-based methods are inefficient because they implement causal inference in the perspective image space. We propose a new framework with a Bird's Eye View (BEV) representation to overcome the above challenges. Specifically, we utilize potential fields as scene affordance, involving repulsive forces derived from road infrastructure and traffic participants, along with attractive forces sourced from target destinations. In this work, we compute potential fields by assigning different energy levels according to the semantic labels obtained from BEV semantic segmentation. We conduct thorough experiments and ablation studies, comparing the proposed method with various state-of-the-art algorithms on both synthetic and real-world datasets. Our results show a notable increase in spatial and temporal consistency, with enhancements of 20.3% and 11.6% on the RiskBench dataset, respectively. Additionally, we can improve computational efficiency by 88%. We achieve improvements of 5.4% in spatial accuracy and 7.2% in temporal consistency on the nuScenes dataset.