 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive modeling of brain tumor: A Deep learning approach
Dec 19, 2019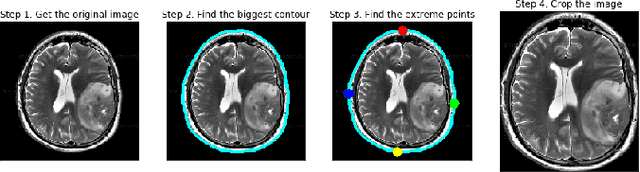

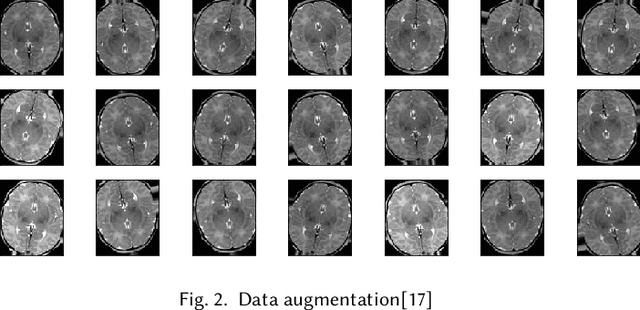
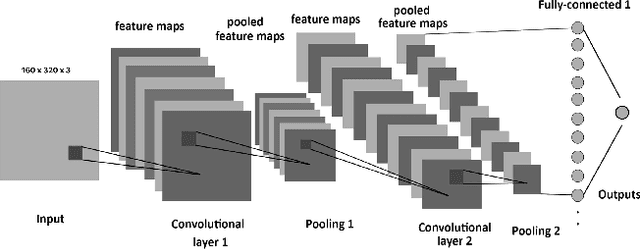
Image processing concepts can visualize the different anatomy structure of the human body. Recent advancements in the field of deep learning have made it possible to detect the growth of cancerous tissue just by a patient's brain Magnetic Resonance Imaging (MRI) scans. These methods require very high accuracy and meager false negative rates to be of any practical use. This paper presents a Convolutional Neural Network (CNN) based transfer learning approach to classify the brain MRI scans into two classes using three pre-trained models. The performances of these models are compared with each other. Experimental results show that the Resnet-50 model achieves the highest accuracy and least false negative rates as 95% and zero respectively. It is followed by VGG-16 and Inception-V3 model with an accuracy of 90% and 55% respectively.
Three Dimensional Route Planning for Multiple Unmanned Aerial Vehicles using Salp Swarm Algorithm
Dec 18, 2019


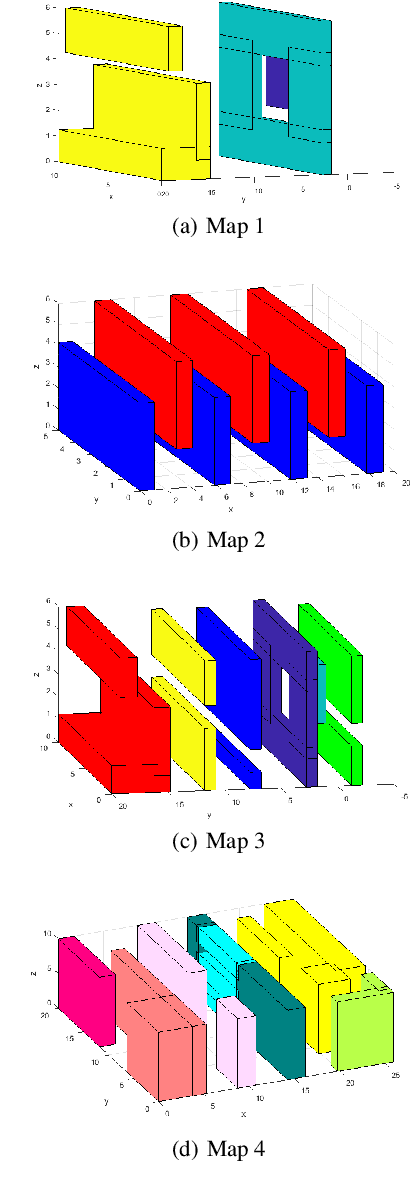
Route planning for multiple Unmanned Aerial Vehicles (UAVs) is a series of translation and rotational steps from a given start location to the destination goal location. The goal of the route planning problem is to determine the most optimal route avoiding any collisions with the obstacles present in the environment. Route planning is an NP-hard optimization problem. In this paper, a newly proposed Salp Swarm Algorithm (SSA) is used, and its performance is compared with deterministic and other Nature-Inspired Algorithms (NIAs). The results illustrate that SSA outperforms all the other meta-heuristic algorithms in route planning for multiple UAVs in a 3D environment. The proposed approach improves the average cost and overall time by 1.25% and 6.035% respectively when compared to recently reported data. Route planning is involved in many real-life applications like robot navigation, self-driving car, autonomous UAV for search and rescue operations in dangerous ground-zero situations, civilian surveillance, military combat and even commercial services like package delivery by drones.