 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Image Completion and Enhancement using GANs
Jul 27, 2023Semantic inpainting or image completion alludes to the task of inferring arbitrary large missing regions in images based on image semantics. Since the prediction of image pixels requires an indication of high-level context, this makes it significantly tougher than image completion, which is often more concerned with correcting data corruption and removing entire objects from the input image. On the other hand, image enhancement attempts to eliminate unwanted noise and blur from the image, along with sustaining most of the image details. Efficient image completion and enhancement model should be able to recover the corrupted and masked regions in images and then refine the image further to increase the quality of the output image. Generative Adversarial Networks (GAN), have turned out to be helpful in picture completion tasks. In this chapter, we will discuss the underlying GAN architecture and how they can be used used for image completion tasks.
Route Planning Using Nature-Inspired Algorithms
Jul 22, 2023There are many different heuristic algorithms for solving combinatorial optimization problems that are commonly described as Nature-Inspired Algorithms (NIAs). Generally, they are inspired by some natural phenomenon, and due to their inherent converging and stochastic nature, they are known to give optimal results when compared to classical approaches. There are a large number of applications of NIAs, perhaps the most popular being route planning problems in robotics - problems that require a sequence of translation and rotation steps from the start to the goal in an optimized manner while avoiding obstacles in the environment. In this chapter, we will first give an overview of Nature-Inspired Algorithms, followed by their classification and common examples. We will then discuss how the NIAs have applied to solve the route planning problem.
Three Dimensional Route Planning for Multiple Unmanned Aerial Vehicles using Salp Swarm Algorithm
Dec 18, 2019


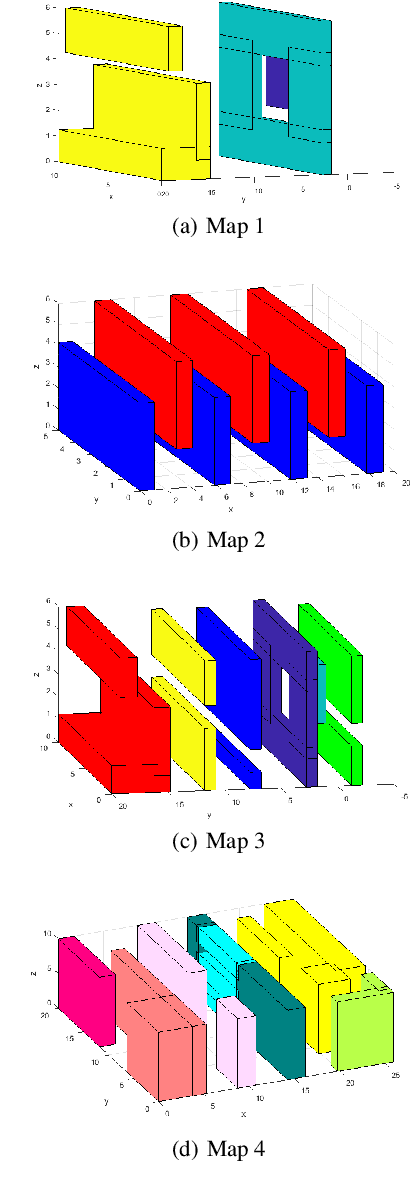
Route planning for multiple Unmanned Aerial Vehicles (UAVs) is a series of translation and rotational steps from a given start location to the destination goal location. The goal of the route planning problem is to determine the most optimal route avoiding any collisions with the obstacles present in the environment. Route planning is an NP-hard optimization problem. In this paper, a newly proposed Salp Swarm Algorithm (SSA) is used, and its performance is compared with deterministic and other Nature-Inspired Algorithms (NIAs). The results illustrate that SSA outperforms all the other meta-heuristic algorithms in route planning for multiple UAVs in a 3D environment. The proposed approach improves the average cost and overall time by 1.25% and 6.035% respectively when compared to recently reported data. Route planning is involved in many real-life applications like robot navigation, self-driving car, autonomous UAV for search and rescue operations in dangerous ground-zero situations, civilian surveillance, military combat and even commercial services like package delivery by drones.