 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree Dimensional Route Planning for Multiple Unmanned Aerial Vehicles using Salp Swarm Algorithm
Dec 18, 2019


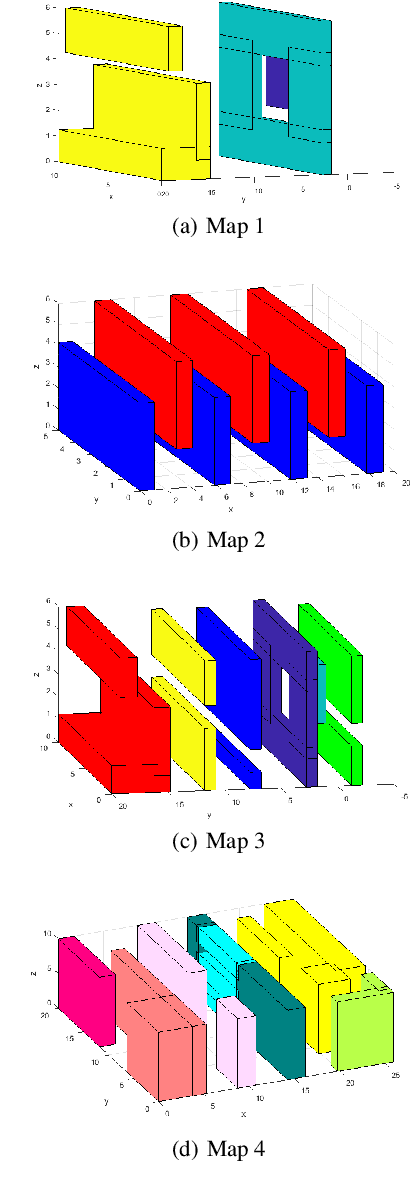
Route planning for multiple Unmanned Aerial Vehicles (UAVs) is a series of translation and rotational steps from a given start location to the destination goal location. The goal of the route planning problem is to determine the most optimal route avoiding any collisions with the obstacles present in the environment. Route planning is an NP-hard optimization problem. In this paper, a newly proposed Salp Swarm Algorithm (SSA) is used, and its performance is compared with deterministic and other Nature-Inspired Algorithms (NIAs). The results illustrate that SSA outperforms all the other meta-heuristic algorithms in route planning for multiple UAVs in a 3D environment. The proposed approach improves the average cost and overall time by 1.25% and 6.035% respectively when compared to recently reported data. Route planning is involved in many real-life applications like robot navigation, self-driving car, autonomous UAV for search and rescue operations in dangerous ground-zero situations, civilian surveillance, military combat and even commercial services like package delivery by drones.
Semantic Image Completion and Enhancement using Deep Learning
Nov 06, 2019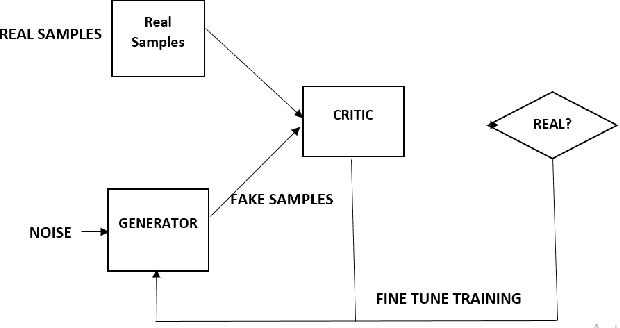
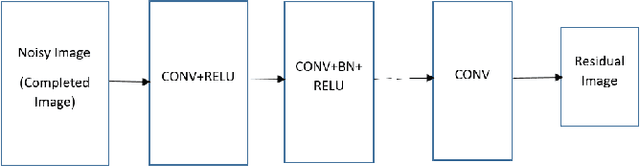
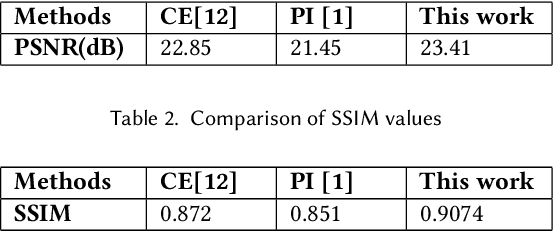
In real-life applications, certain images utilized are corrupted in which the image pixels are damaged or missing, which increases the complexity of computer vision tasks. In this paper, a deep learning architecture is proposed to deal with image completion and enhancement. Generative Adversarial Networks (GAN), has been turned out to be helpful in picture completion tasks. Therefore, in GANs, Wasserstein GAN architecture is used for image completion which creates the coarse patches to filling the missing region in the distorted picture, and the enhancement network will additionally refine the resultant pictures utilizing residual learning procedures and hence give better complete pictures for computer vision applications. Experimental outcomes show that the proposed approach improves the Peak Signal to Noise ratio and Structural Similarity Index values by 2.45% and 4% respectively when compared to the recently reported data.