 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffect of Fog Particle Size Distribution on 3D Object Detection Under Adverse Weather Conditions
Aug 02, 2024LiDAR-based sensors employing optical spectrum signals play a vital role in providing significant information about the target objects in autonomous driving vehicle systems. However, the presence of fog in the atmosphere severely degrades the overall system's performance. This manuscript analyzes the role of fog particle size distributions in 3D object detection under adverse weather conditions. We utilise Mie theory and meteorological optical range (MOR) to calculate the attenuation and backscattering coefficient values for point cloud generation and analyze the overall system's accuracy in Car, Cyclist, and Pedestrian case scenarios under easy, medium and hard detection difficulties. Gamma and Junge (Power-Law) distributions are employed to mathematically model the fog particle size distribution under strong and moderate advection fog environments. Subsequently, we modified the KITTI dataset based on the backscattering coefficient values and trained it on the PV-RCNN++ deep neural network model for Car, Cyclist, and Pedestrian cases under different detection difficulties. The result analysis shows a significant variation in the system's accuracy concerning the changes in target object dimensionality, the nature of the fog environment and increasing detection difficulties, with the Car exhibiting the highest accuracy of around 99% and the Pedestrian showing the lowest accuracy of around 73%.
Semantic Image Completion and Enhancement using Deep Learning
Nov 06, 2019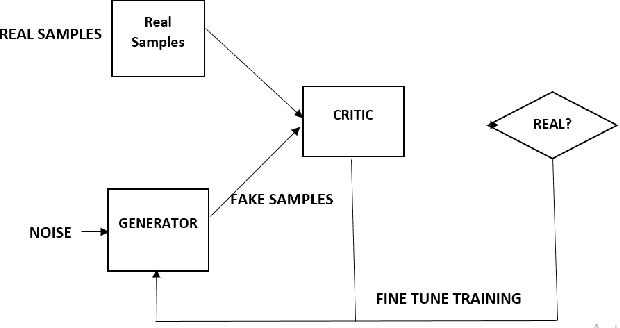
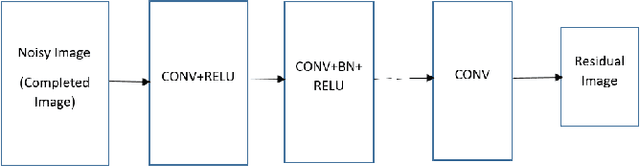
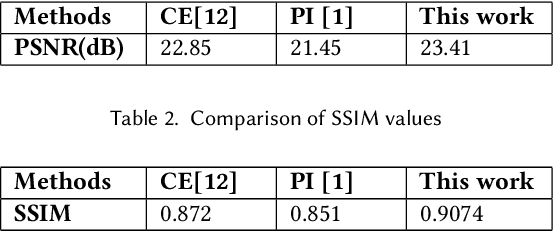
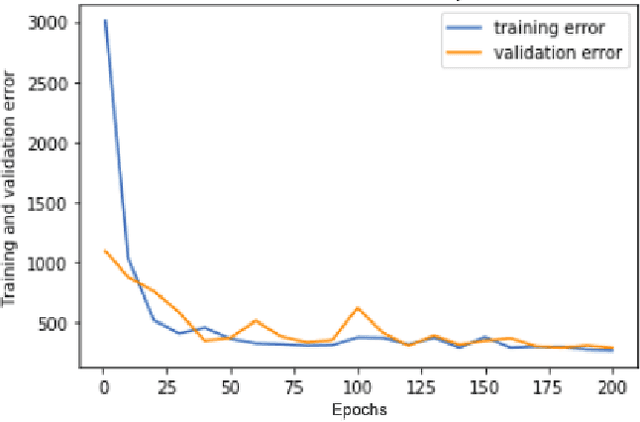
In real-life applications, certain images utilized are corrupted in which the image pixels are damaged or missing, which increases the complexity of computer vision tasks. In this paper, a deep learning architecture is proposed to deal with image completion and enhancement. Generative Adversarial Networks (GAN), has been turned out to be helpful in picture completion tasks. Therefore, in GANs, Wasserstein GAN architecture is used for image completion which creates the coarse patches to filling the missing region in the distorted picture, and the enhancement network will additionally refine the resultant pictures utilizing residual learning procedures and hence give better complete pictures for computer vision applications. Experimental outcomes show that the proposed approach improves the Peak Signal to Noise ratio and Structural Similarity Index values by 2.45% and 4% respectively when compared to the recently reported data.