 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric-Photometric Event-based 3D Gaussian Ray Tracing
Dec 21, 2025Event cameras offer a high temporal resolution over traditional frame-based cameras, which makes them suitable for motion and structure estimation. However, it has been unclear how event-based 3D Gaussian Splatting (3DGS) approaches could leverage fine-grained temporal information of sparse events. This work proposes a framework to address the trade-off between accuracy and temporal resolution in event-based 3DGS. Our key idea is to decouple the rendering into two branches: event-by-event geometry (depth) rendering and snapshot-based radiance (intensity) rendering, by using ray-tracing and the image of warped events. The extensive evaluation shows that our method achieves state-of-the-art performance on the real-world datasets and competitive performance on the synthetic dataset. Also, the proposed method works without prior information (e.g., pretrained image reconstruction models) or COLMAP-based initialization, is more flexible in the event selection number, and achieves sharp reconstruction on scene edges with fast training time. We hope that this work deepens our understanding of the sparse nature of events for 3D reconstruction. The code will be released.
Distance Estimation in Outdoor Driving Environments Using Phase-only Correlation Method with Event Cameras
May 23, 2025With the growing adoption of autonomous driving, the advancement of sensor technology is crucial for ensuring safety and reliable operation. Sensor fusion techniques that combine multiple sensors such as LiDAR, radar, and cameras have proven effective, but the integration of multiple devices increases both hardware complexity and cost. Therefore, developing a single sensor capable of performing multiple roles is highly desirable for cost-efficient and scalable autonomous driving systems. Event cameras have emerged as a promising solution due to their unique characteristics, including high dynamic range, low latency, and high temporal resolution. These features enable them to perform well in challenging lighting conditions, such as low-light or backlit environments. Moreover, their ability to detect fine-grained motion events makes them suitable for applications like pedestrian detection and vehicle-to-infrastructure communication via visible light. In this study, we present a method for distance estimation using a monocular event camera and a roadside LED bar. By applying a phase-only correlation technique to the event data, we achieve sub-pixel precision in detecting the spatial shift between two light sources. This enables accurate triangulation-based distance estimation without requiring stereo vision. Field experiments conducted in outdoor driving scenarios demonstrated that the proposed approach achieves over 90% success rate with less than 0.5-meter error for distances ranging from 20 to 60 meters. Future work includes extending this method to full position estimation by leveraging infrastructure such as smart poles equipped with LEDs, enabling event-camera-based vehicles to determine their own position in real time. This advancement could significantly enhance navigation accuracy, route optimization, and integration into intelligent transportation systems.
Evaluation of Mobile Environment for Vehicular Visible Light Communication Using Multiple LEDs and Event Cameras
May 21, 2025In the fields of Advanced Driver Assistance Systems (ADAS) and Autonomous Driving (AD), sensors that serve as the ``eyes'' for sensing the vehicle's surrounding environment are essential. Traditionally, image sensors and LiDAR have played this role. However, a new type of vision sensor, event cameras, has recently attracted attention. Event cameras respond to changes in the surrounding environment (e.g., motion), exhibit strong robustness against motion blur, and perform well in high dynamic range environments, which are desirable in robotics applications. Furthermore, the asynchronous and low-latency principles of data acquisition make event cameras suitable for optical communication. By adding communication functionality to event cameras, it becomes possible to utilize I2V communication to immediately share information about forward collisions, sudden braking, and road conditions, thereby contributing to hazard avoidance. Additionally, receiving information such as signal timing and traffic volume enables speed adjustment and optimal route selection, facilitating more efficient driving. In this study, we construct a vehicle visible light communication system where event cameras are receivers, and multiple LEDs are transmitters. In driving scenes, the system tracks the transmitter positions and separates densely packed LED light sources using pilot sequences based on Walsh-Hadamard codes. As a result, outdoor vehicle experiments demonstrate error-free communication under conditions where the transmitter-receiver distance was within 40 meters and the vehicle's driving speed was 30 km/h (8.3 m/s).
GA3CE: Unconstrained 3D Gaze Estimation with Gaze-Aware 3D Context Encoding
May 15, 2025We propose a novel 3D gaze estimation approach that learns spatial relationships between the subject and objects in the scene, and outputs 3D gaze direction. Our method targets unconstrained settings, including cases where close-up views of the subject's eyes are unavailable, such as when the subject is distant or facing away. Previous approaches typically rely on either 2D appearance alone or incorporate limited spatial cues using depth maps in the non-learnable post-processing step. Estimating 3D gaze direction from 2D observations in these scenarios is challenging; variations in subject pose, scene layout, and gaze direction, combined with differing camera poses, yield diverse 2D appearances and 3D gaze directions even when targeting the same 3D scene. To address this issue, we propose GA3CE: Gaze-Aware 3D Context Encoding. Our method represents subject and scene using 3D poses and object positions, treating them as 3D context to learn spatial relationships in 3D space. Inspired by human vision, we align this context in an egocentric space, significantly reducing spatial complexity. Furthermore, we propose D$^3$ (direction-distance-decomposed) positional encoding to better capture the spatial relationship between 3D context and gaze direction in direction and distance space. Experiments demonstrate substantial improvements, reducing mean angle error by 13%-37% compared to leading baselines on benchmark datasets in single-frame settings.
E-VLC: A Real-World Dataset for Event-based Visible Light Communication And Localization
Apr 25, 2025Optical communication using modulated LEDs (e.g., visible light communication) is an emerging application for event cameras, thanks to their high spatio-temporal resolutions. Event cameras can be used simply to decode the LED signals and also to localize the camera relative to the LED marker positions. However, there is no public dataset to benchmark the decoding and localization in various real-world settings. We present, to the best of our knowledge, the first public dataset that consists of an event camera, a frame camera, and ground-truth poses that are precisely synchronized with hardware triggers. It provides various camera motions with various sensitivities in different scene brightness settings, both indoor and outdoor. Furthermore, we propose a novel method of localization that leverages the Contrast Maximization framework for motion estimation and compensation. The detailed analysis and experimental results demonstrate the advantages of LED-based localization with events over the conventional AR-marker--based one with frames, as well as the efficacy of the proposed method in localization. We hope that the proposed dataset serves as a future benchmark for both motion-related classical computer vision tasks and LED marker decoding tasks simultaneously, paving the way to broadening applications of event cameras on mobile devices. https://woven-visionai.github.io/evlc-dataset
Iterative Event-based Motion Segmentation by Variational Contrast Maximization
Apr 25, 2025Event cameras provide rich signals that are suitable for motion estimation since they respond to changes in the scene. As any visual changes in the scene produce event data, it is paramount to classify the data into different motions (i.e., motion segmentation), which is useful for various tasks such as object detection and visual servoing. We propose an iterative motion segmentation method, by classifying events into background (e.g., dominant motion hypothesis) and foreground (independent motion residuals), thus extending the Contrast Maximization framework. Experimental results demonstrate that the proposed method successfully classifies event clusters both for public and self-recorded datasets, producing sharp, motion-compensated edge-like images. The proposed method achieves state-of-the-art accuracy on moving object detection benchmarks with an improvement of over 30%, and demonstrates its possibility of applying to more complex and noisy real-world scenes. We hope this work broadens the sensitivity of Contrast Maximization with respect to both motion parameters and input events, thus contributing to theoretical advancements in event-based motion segmentation estimation. https://github.com/aoki-media-lab/event_based_segmentation_vcmax
Simultaneous Motion And Noise Estimation with Event Cameras
Apr 05, 2025



Event cameras are emerging vision sensors, whose noise is challenging to characterize. Existing denoising methods for event cameras consider other tasks such as motion estimation separately (i.e., sequentially after denoising). However, motion is an intrinsic part of event data, since scene edges cannot be sensed without motion. This work proposes, to the best of our knowledge, the first method that simultaneously estimates motion in its various forms (e.g., ego-motion, optical flow) and noise. The method is flexible, as it allows replacing the 1-step motion estimation of the widely-used Contrast Maximization framework with any other motion estimator, such as deep neural networks. The experiments show that the proposed method achieves state-of-the-art results on the E-MLB denoising benchmark and competitive results on the DND21 benchmark, while showing its efficacy on motion estimation and intensity reconstruction tasks. We believe that the proposed approach contributes to strengthening the theory of event-data denoising, as well as impacting practical denoising use-cases, as we release the code upon acceptance. Project page: https://github.com/tub-rip/ESMD
3D Human Scan With A Moving Event Camera
Apr 12, 2024
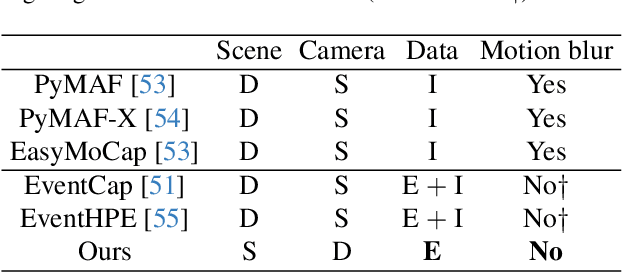
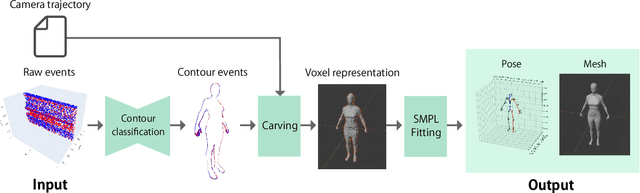
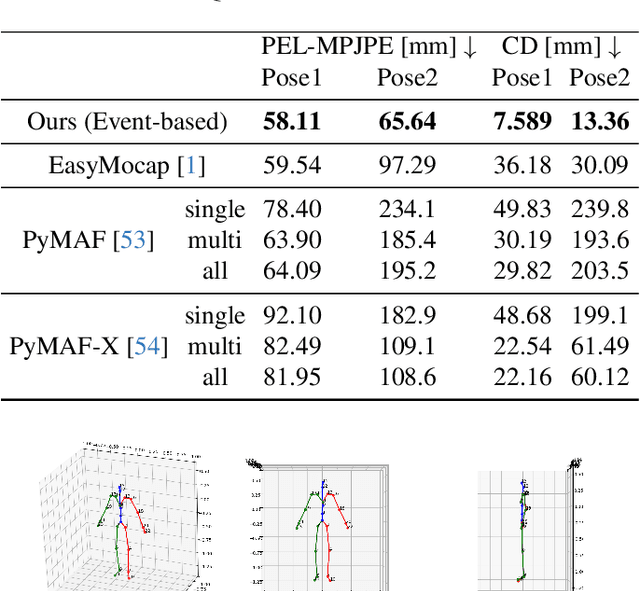
Capturing the 3D human body is one of the important tasks in computer vision with a wide range of applications such as virtual reality and sports analysis. However, conventional frame cameras are limited by their temporal resolution and dynamic range, which imposes constraints in real-world application setups. Event cameras have the advantages of high temporal resolution and high dynamic range (HDR), but the development of event-based methods is necessary to handle data with different characteristics. This paper proposes a novel event-based method for 3D pose estimation and human mesh recovery. Prior work on event-based human mesh recovery require frames (images) as well as event data. The proposed method solely relies on events; it carves 3D voxels by moving the event camera around a stationary body, reconstructs the human pose and mesh by attenuated rays, and fit statistical body models, preserving high-frequency details. The experimental results show that the proposed method outperforms conventional frame-based methods in the estimation accuracy of both pose and body mesh. We also demonstrate results in challenging situations where a conventional camera has motion blur. This is the first to demonstrate event-only human mesh recovery, and we hope that it is the first step toward achieving robust and accurate 3D human body scanning from vision sensors.
Event-based Background-Oriented Schlieren
Nov 01, 2023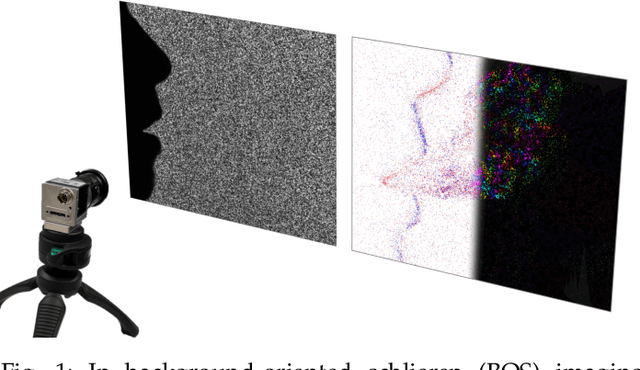
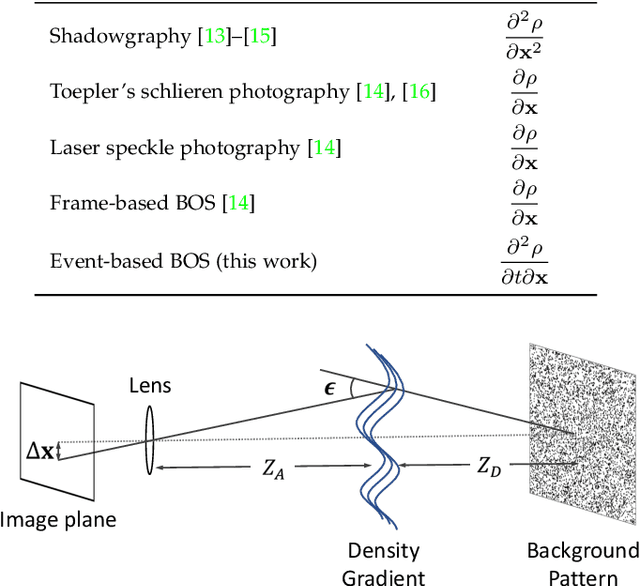
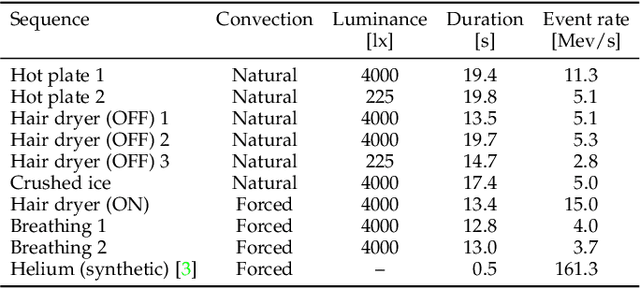
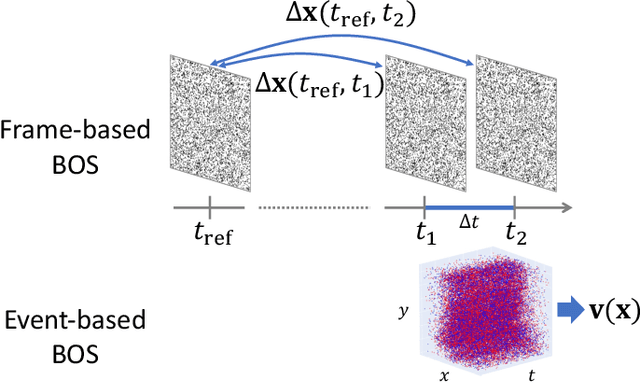
Schlieren imaging is an optical technique to observe the flow of transparent media, such as air or water, without any particle seeding. However, conventional frame-based techniques require both high spatial and temporal resolution cameras, which impose bright illumination and expensive computation limitations. Event cameras offer potential advantages (high dynamic range, high temporal resolution, and data efficiency) to overcome such limitations due to their bio-inspired sensing principle. This paper presents a novel technique for perceiving air convection using events and frames by providing the first theoretical analysis that connects event data and schlieren. We formulate the problem as a variational optimization one combining the linearized event generation model with a physically-motivated parameterization that estimates the temporal derivative of the air density. The experiments with accurately aligned frame- and event camera data reveal that the proposed method enables event cameras to obtain on par results with existing frame-based optical flow techniques. Moreover, the proposed method works under dark conditions where frame-based schlieren fails, and also enables slow-motion analysis by leveraging the event camera's advantages. Our work pioneers and opens a new stack of event camera applications, as we publish the source code as well as the first schlieren dataset with high-quality frame and event data. https://github.com/tub-rip/event_based_bos
Fast Event-based Optical Flow Estimation by Triplet Matching
Dec 23, 2022Event cameras are novel bio-inspired sensors that offer advantages over traditional cameras (low latency, high dynamic range, low power, etc.). Optical flow estimation methods that work on packets of events trade off speed for accuracy, while event-by-event (incremental) methods have strong assumptions and have not been tested on common benchmarks that quantify progress in the field. Towards applications on resource-constrained devices, it is important to develop optical flow algorithms that are fast, light-weight and accurate. This work leverages insights from neuroscience, and proposes a novel optical flow estimation scheme based on triplet matching. The experiments on publicly available benchmarks demonstrate its capability to handle complex scenes with comparable results as prior packet-based algorithms. In addition, the proposed method achieves the fastest execution time (> 10 kHz) on standard CPUs as it requires only three events in estimation. We hope that our research opens the door to real-time, incremental motion estimation methods and applications in real-world scenarios.