 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLFC-DA: Logical Formula-Controlled Data Augmentation for Enhanced Logical Reasoning
Nov 05, 2025For complex logical data augmentation, heavy reliance on human annotation is costly, whereas direct generation with large language models yields uninterpretable and logically homogeneous examples. To address this, we present LFC-DA, a symbolic-logic-controlled pipeline: logical text is first mapped to propositional expressions, a compact rule library is compiled, and a bounded state-space search systematically discovers valid formulas that are then verbalized back into natural-language questions, ensuring both diversity and logical rigor under propositional logic. Experiments on ReClor and LogiQA show significant improvements in the logical-reasoning accuracy of pretrained models, confirming the effectiveness of LFC-DA for LLM-guided logical data augmentation.
Solving Prior Distribution Mismatch in Diffusion Models via Optimal Transport
Oct 17, 2024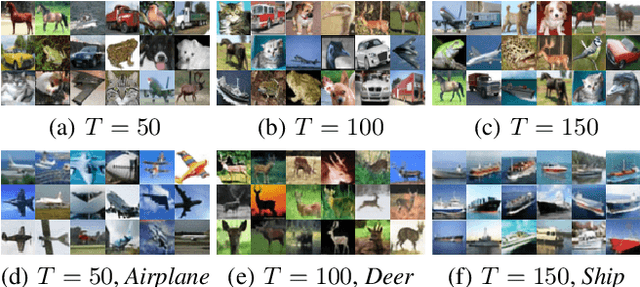

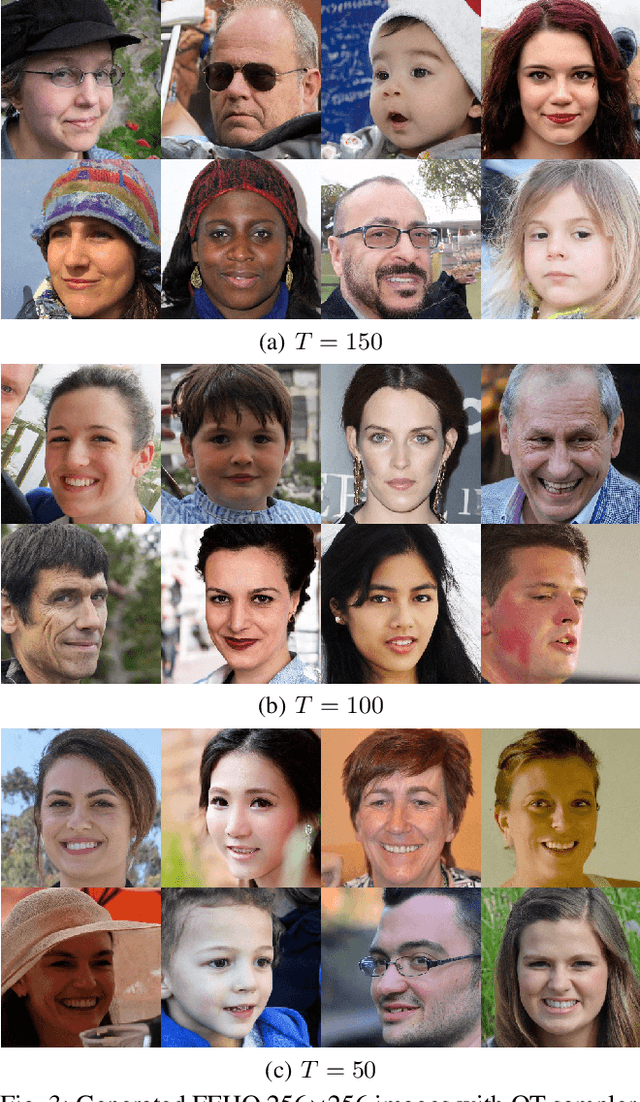
In recent years, the knowledge surrounding diffusion models(DMs) has grown significantly, though several theoretical gaps remain. Particularly noteworthy is prior error, defined as the discrepancy between the termination distribution of the forward process and the initial distribution of the reverse process. To address these deficiencies, this paper explores the deeper relationship between optimal transport(OT) theory and DMs with discrete initial distribution. Specifically, we demonstrate that the two stages of DMs fundamentally involve computing time-dependent OT. However, unavoidable prior error result in deviation during the reverse process under quadratic transport cost. By proving that as the diffusion termination time increases, the probability flow exponentially converges to the gradient of the solution to the classical Monge-Amp\`ere equation, we establish a vital link between these fields. Therefore, static OT emerges as the most intrinsic single-step method for bridging this theoretical potential gap. Additionally, we apply these insights to accelerate sampling in both unconditional and conditional generation scenarios. Experimental results across multiple image datasets validate the effectiveness of our approach.
In-Place Panoptic Radiance Field Segmentation with Perceptual Prior for 3D Scene Understanding
Oct 06, 2024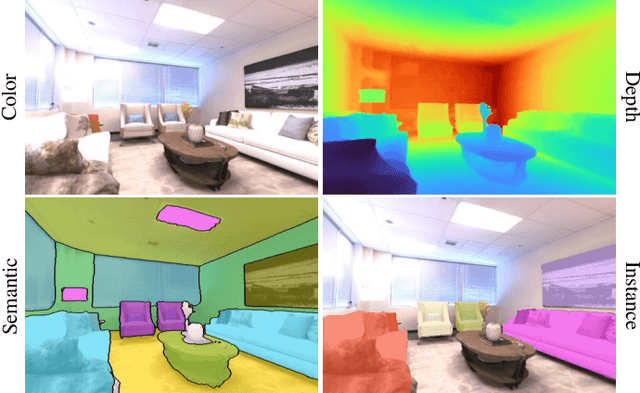
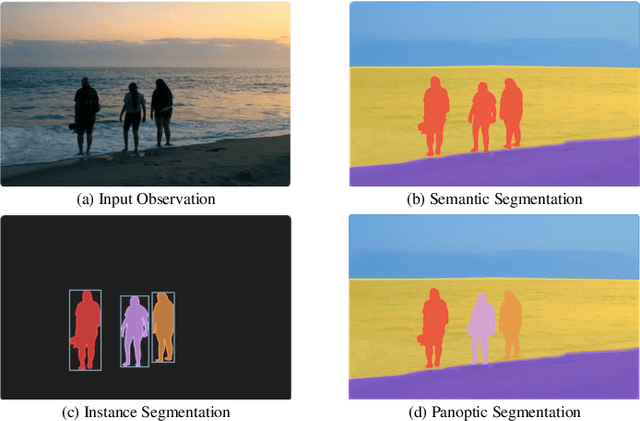
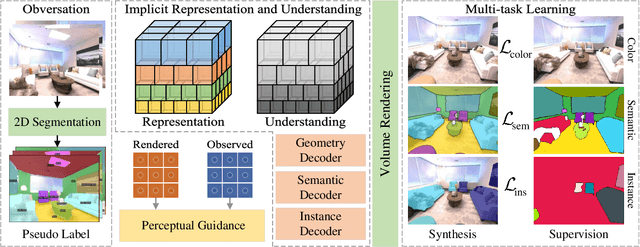
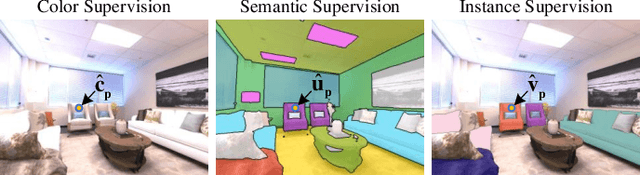
Accurate 3D scene representation and panoptic understanding are essential for applications such as virtual reality, robotics, and autonomous driving. However, challenges persist with existing methods, including precise 2D-to-3D mapping, handling complex scene characteristics like boundary ambiguity and varying scales, and mitigating noise in panoptic pseudo-labels. This paper introduces a novel perceptual-prior-guided 3D scene representation and panoptic understanding method, which reformulates panoptic understanding within neural radiance fields as a linear assignment problem involving 2D semantics and instance recognition. Perceptual information from pre-trained 2D panoptic segmentation models is incorporated as prior guidance, thereby synchronizing the learning processes of appearance, geometry, and panoptic understanding within neural radiance fields. An implicit scene representation and understanding model is developed to enhance generalization across indoor and outdoor scenes by extending the scale-encoded cascaded grids within a reparameterized domain distillation framework. This model effectively manages complex scene attributes and generates 3D-consistent scene representations and panoptic understanding outcomes for various scenes. Experiments and ablation studies under challenging conditions, including synthetic and real-world scenes, demonstrate the proposed method's effectiveness in enhancing 3D scene representation and panoptic segmentation accuracy.
Multicam-SLAM: Non-overlapping Multi-camera SLAM for Indirect Visual Localization and Navigation
Jun 10, 2024



This paper presents a novel approach to visual simultaneous localization and mapping (SLAM) using multiple RGB-D cameras. The proposed method, Multicam-SLAM, significantly enhances the robustness and accuracy of SLAM systems by capturing more comprehensive spatial information from various perspectives. This method enables the accurate determination of pose relationships among multiple cameras without the need for overlapping fields of view. The proposed Muticam-SLAM includes a unique multi-camera model, a multi-keyframes structure, and several parallel SLAM threads. The multi-camera model allows for the integration of data from multiple cameras, while the multi-keyframes and parallel SLAM threads ensure efficient and accurate pose estimation and mapping. Extensive experiments in various environments demonstrate the superior accuracy and robustness of the proposed method compared to conventional single-camera SLAM systems. The results highlight the potential of the proposed Multicam-SLAM for more complex and challenging applications. Code is available at \url{https://github.com/AlterPang/Multi_ORB_SLAM}.
OT-Net: A Reusable Neural Optimal Transport Solver
Jun 14, 2023With the widespread application of optimal transport (OT), its calculation becomes essential, and various algorithms have emerged. However, the existing methods either have low efficiency or cannot represent discontinuous maps. A novel reusable neural OT solver OT-Net is thus presented, which first learns Brenier's height representation via the neural network to obtain its potential, and then gained the OT map by computing the gradient of the potential. The algorithm has two merits, 1) it can easily represent discontinuous maps, which allows it to match any target distribution with discontinuous supports and achieve sharp boundaries. This can well eliminate mode collapse in the generated models. 2) The OT map can be calculated straightly by the proposed algorithm when new target samples are added, which greatly improves the efficiency and reusability of the map. Moreover, the theoretical error bound of the algorithm is analyzed, and we have demonstrated the empirical success of our approach in image generation, color transfer, and domain adaptation.
who is snoring? snore based user recognition
Jan 28, 2023Snoring is one of the most prominent symptoms of Obstructive Sleep Apnea-Hypopnea Syndrome (OSAH), a highly prevalent disease that causes repetitive collapse and cessation of the upper airway. Thus, accurate snore sound monitoring and analysis is crucial. However, the traditional monitoring method polysomnography (PSG) requires the patients to stay at a sleep clinic for the whole night and be connected to many pieces of equipment. An alternative and less invasive way is passive monitoring using a smartphone at home or in the clinical settings. But, there is a challenge: the environment may be shared by people such that the raw audio may contain the snore activities of the bed partner or other person. False capturing of the snoring activity could lead to critical false alarms and misdiagnosis of the patients. To address this limitation, we propose a hypothesis that snore sound contains unique identity information which can be used for user recognition. We analyzed various machine learning models: Gaussian Mixture Model (GMM), GMM-UBM (Universial Background Model), and a Deep Neural Network (DNN) on MPSSC - an open source snoring dataset to evaluate the validity of our hypothesis. Our results are promising as we achieved around 90% accuracy in identification and verification tasks. This work marks the first step towards understanding the practicality of snore based user monitoring to enable multiple healthcare applicaitons.