 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFPGA-Based Neural Thrust Controller for UAVs
Mar 28, 2024The advent of unmanned aerial vehicles (UAVs) has improved a variety of fields by providing a versatile, cost-effective and accessible platform for implementing state-of-the-art algorithms. To accomplish a broader range of tasks, there is a growing need for enhanced on-board computing to cope with increasing complexity and dynamic environmental conditions. Recent advances have seen the application of Deep Neural Networks (DNNs), particularly in combination with Reinforcement Learning (RL), to improve the adaptability and performance of UAVs, especially in unknown environments. However, the computational requirements of DNNs pose a challenge to the limited computing resources available on many UAVs. This work explores the use of Field Programmable Gate Arrays (FPGAs) as a viable solution to this challenge, offering flexibility, high performance, energy and time efficiency. We propose a novel hardware board equipped with an Artix-7 FPGA for a popular open-source micro-UAV platform. We successfully validate its functionality by implementing an RL-based low-level controller using real-world experiments.
Dynamic Time Slot Allocation Algorithm for Quadcopter Swarms
Feb 02, 2022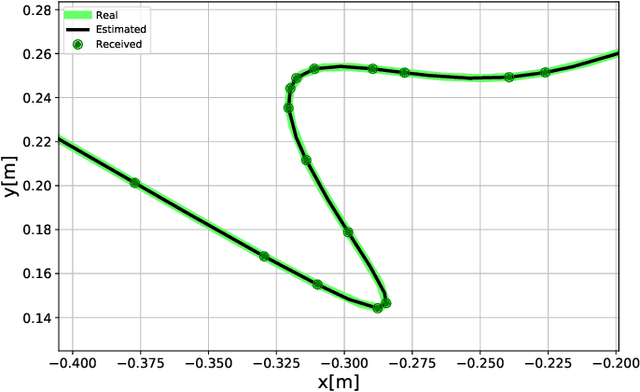
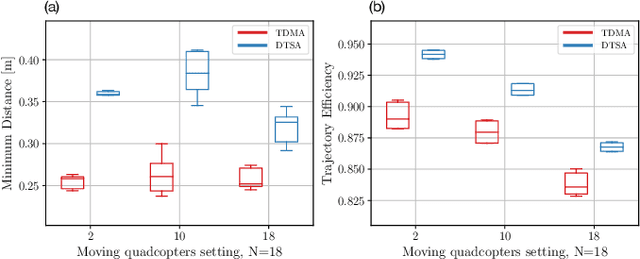
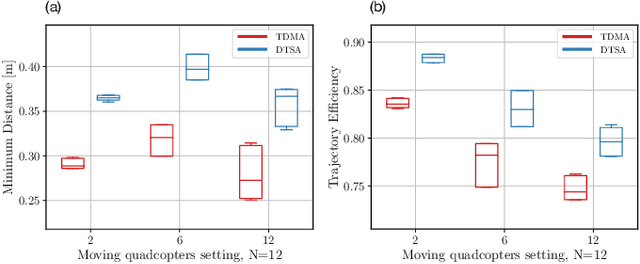
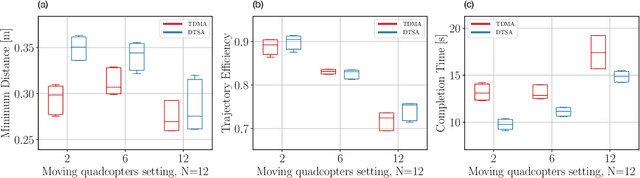
A swarm of quadcopters can perform cooperative tasks, such as monitoring of a large area, more efficiently than a single one. However, to be able to successfully work together, the quadcopters must be aware of the position of the other swarm members, especially to avoid collisions. A quadcopter can share its own position by transmitting it via radio waves and in order to allow multiple quadcopters to communicate effectively, a decentralized channel access protocol is essential. We propose a new dynamic channel access protocol, called Dynamic time slot allocation (DTSA), where the quadcopters share the total channel access time in a non-periodic and decentralized manner. Quadcopters with higher communication demands occupy more time slots than less active ones. Our dynamic approach allows the agents to adapt to changing swarm situations and therefore to act efficiently, as compared to the state-of-the-art periodic channel access protocol, time division multiple access (TDMA). Along with simulations, we also do experiments using real Crazyflie quadcopters to show the improved performance of DTSA as compared to TDMA.