 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Time Slot Allocation Algorithm for Quadcopter Swarms
Paper and Code
Feb 02, 2022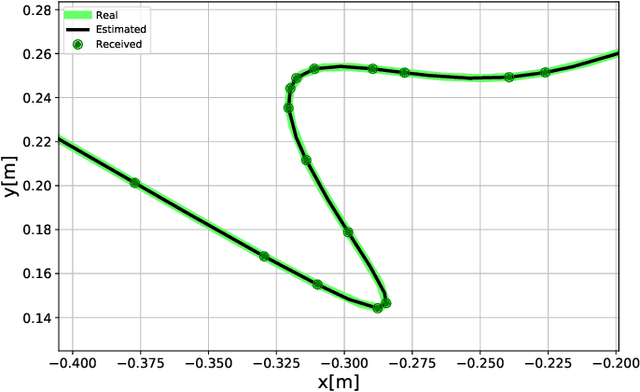
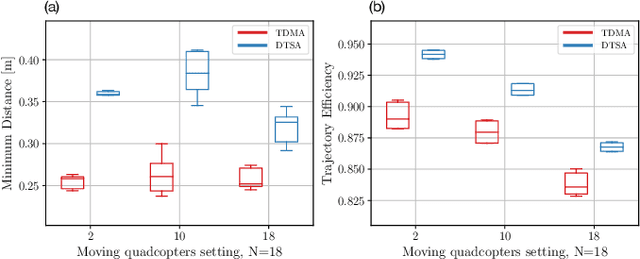
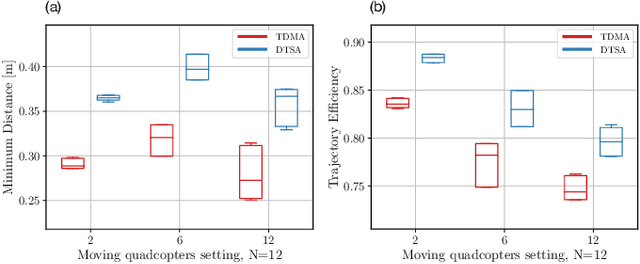
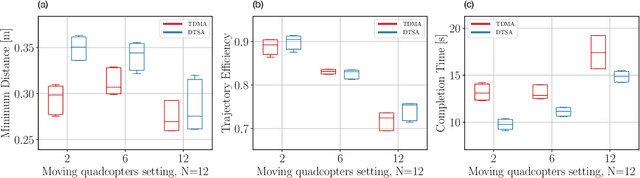
A swarm of quadcopters can perform cooperative tasks, such as monitoring of a large area, more efficiently than a single one. However, to be able to successfully work together, the quadcopters must be aware of the position of the other swarm members, especially to avoid collisions. A quadcopter can share its own position by transmitting it via radio waves and in order to allow multiple quadcopters to communicate effectively, a decentralized channel access protocol is essential. We propose a new dynamic channel access protocol, called Dynamic time slot allocation (DTSA), where the quadcopters share the total channel access time in a non-periodic and decentralized manner. Quadcopters with higher communication demands occupy more time slots than less active ones. Our dynamic approach allows the agents to adapt to changing swarm situations and therefore to act efficiently, as compared to the state-of-the-art periodic channel access protocol, time division multiple access (TDMA). Along with simulations, we also do experiments using real Crazyflie quadcopters to show the improved performance of DTSA as compared to TDMA.