 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuro-Symbolic Recommendation Model based on Logic Query
Sep 14, 2023



A recommendation system assists users in finding items that are relevant to them. Existing recommendation models are primarily based on predicting relationships between users and items and use complex matching models or incorporate extensive external information to capture association patterns in data. However, recommendation is not only a problem of inductive statistics using data; it is also a cognitive task of reasoning decisions based on knowledge extracted from information. Hence, a logic system could naturally be incorporated for the reasoning in a recommendation task. However, although hard-rule approaches based on logic systems can provide powerful reasoning ability, they struggle to cope with inconsistent and incomplete knowledge in real-world tasks, especially for complex tasks such as recommendation. Therefore, in this paper, we propose a neuro-symbolic recommendation model, which transforms the user history interactions into a logic expression and then transforms the recommendation prediction into a query task based on this logic expression. The logic expressions are then computed based on the modular logic operations of the neural network. We also construct an implicit logic encoder to reasonably reduce the complexity of the logic computation. Finally, a user's interest items can be queried in the vector space based on the computation results. Experiments on three well-known datasets verified that our method performs better compared to state of the art shallow, deep, session, and reasoning models.
Neural-Symbolic Recommendation with Graph-Enhanced Information
Jul 11, 2023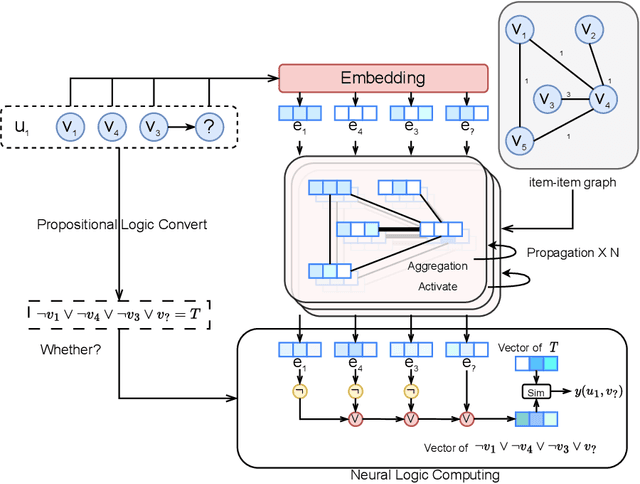
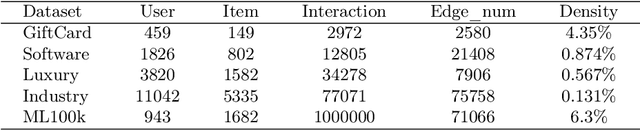
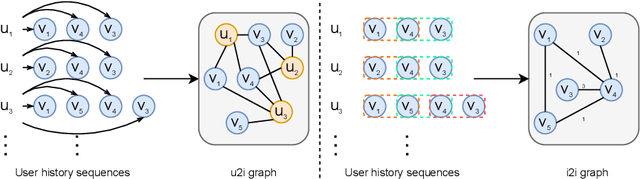
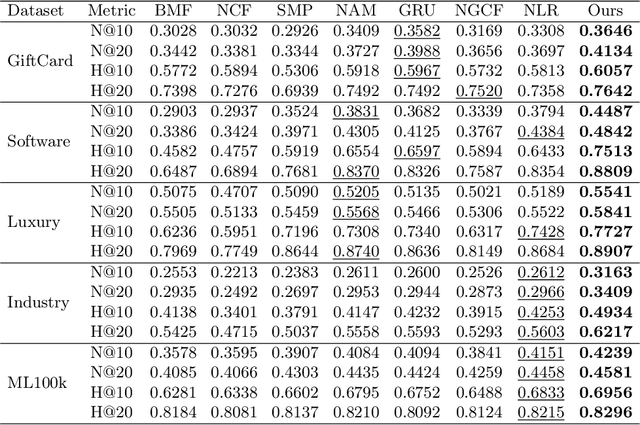
The recommendation system is not only a problem of inductive statistics from data but also a cognitive task that requires reasoning ability. The most advanced graph neural networks have been widely used in recommendation systems because they can capture implicit structured information from graph-structured data. However, like most neural network algorithms, they only learn matching patterns from a perception perspective. Some researchers use user behavior for logic reasoning to achieve recommendation prediction from the perspective of cognitive reasoning, but this kind of reasoning is a local one and ignores implicit information on a global scale. In this work, we combine the advantages of graph neural networks and propositional logic operations to construct a neuro-symbolic recommendation model with both global implicit reasoning ability and local explicit logic reasoning ability. We first build an item-item graph based on the principle of adjacent interaction and use graph neural networks to capture implicit information in global data. Then we transform user behavior into propositional logic expressions to achieve recommendations from the perspective of cognitive reasoning. Extensive experiments on five public datasets show that our proposed model outperforms several state-of-the-art methods, source code is avaliable at [https://github.com/hanzo2020/GNNLR].
Fast Model Identification via Physics Engines for Data-Efficient Policy Search
Jun 13, 2018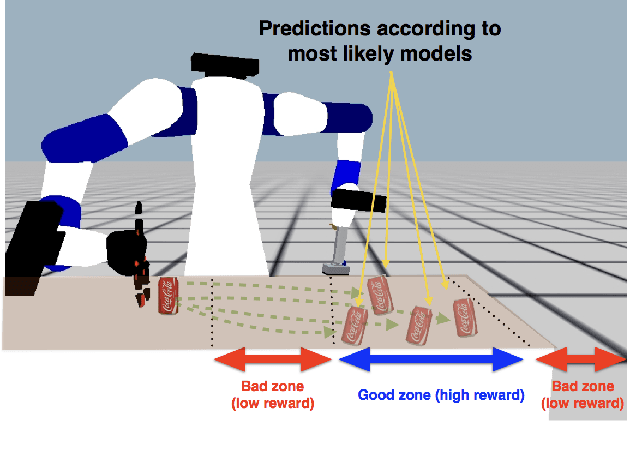
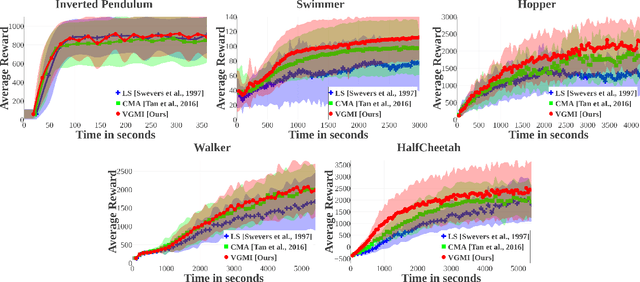
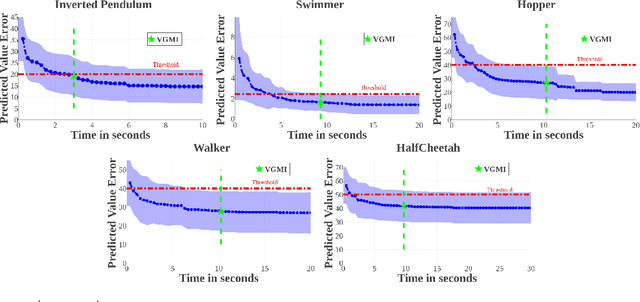
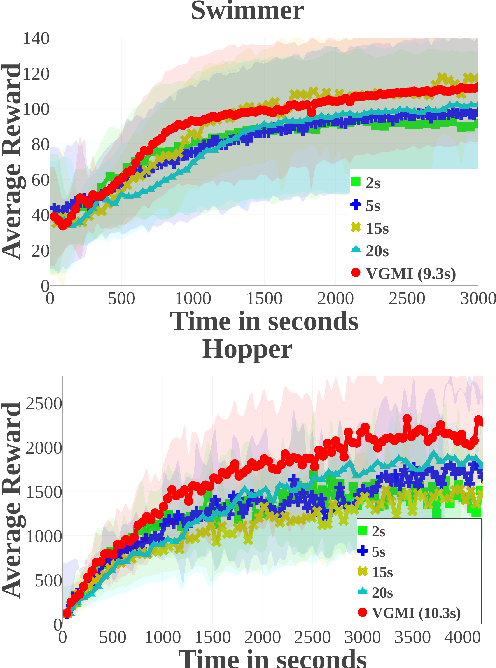
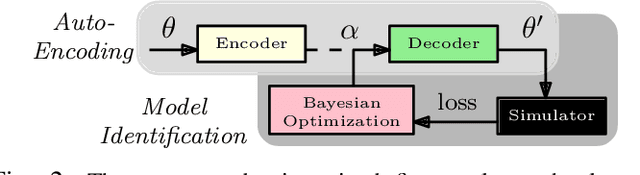
This paper presents a method for identifying mechanical parameters of robots or objects, such as their mass and friction coefficients. Key features are the use of off-the-shelf physics engines and the adaptation of a Bayesian optimization technique towards minimizing the number of real-world experiments needed for model-based reinforcement learning. The proposed framework reproduces in a physics engine experiments performed on a real robot and optimizes the model's mechanical parameters so as to match real-world trajectories. The optimized model is then used for learning a policy in simulation, before real-world deployment. It is well understood, however, that it is hard to exactly reproduce real trajectories in simulation. Moreover, a near-optimal policy can be frequently found with an imperfect model. Therefore, this work proposes a strategy for identifying a model that is just good enough to approximate the value of a locally optimal policy with a certain confidence, instead of wasting effort on identifying the most accurate model. Evaluations, performed both in simulation and on a real robotic manipulation task, indicate that the proposed strategy results in an overall time-efficient, integrated model identification and learning solution, which significantly improves the data-efficiency of existing policy search algorithms.
Efficient Model Identification for Tensegrity Locomotion
Apr 12, 2018
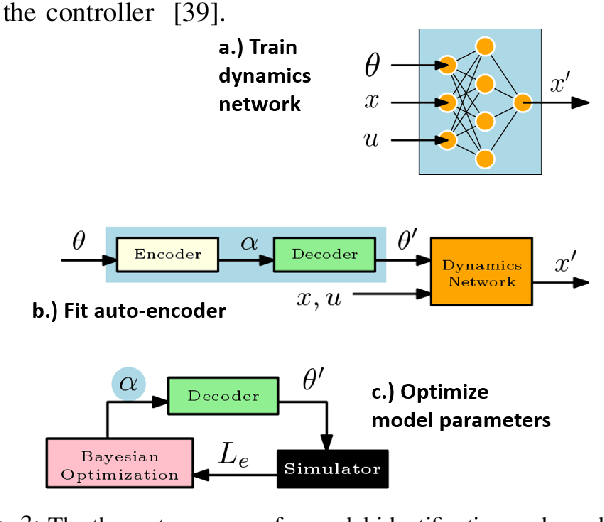
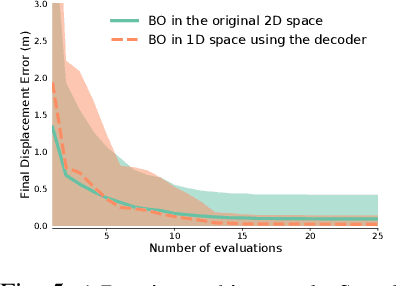
This paper aims to identify in a practical manner unknown physical parameters, such as mechanical models of actuated robot links, which are critical in dynamical robotic tasks. Key features include the use of an off-the-shelf physics engine and the Bayesian optimization framework. The task being considered is locomotion with a high-dimensional, compliant Tensegrity robot. A key insight, in this case, is the need to project the model identification challenge into an appropriate lower dimensional space for efficiency. Comparisons with alternatives indicate that the proposed method can identify the parameters more accurately within the given time budget, which also results in more precise locomotion control.
Information-theoretic Model Identification and Policy Search using Physics Engines with Application to Robotic Manipulation
Mar 22, 2017
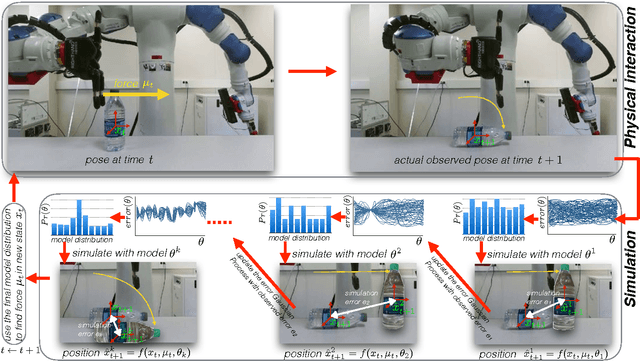
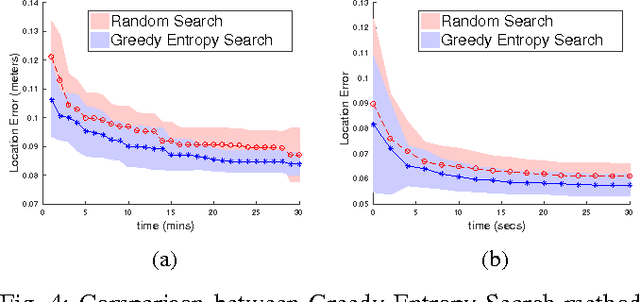
We consider the problem of a robot learning the mechanical properties of objects through physical interaction with the object, and introduce a practical, data-efficient approach for identifying the motion models of these objects. The proposed method utilizes a physics engine, where the robot seeks to identify the inertial and friction parameters of the object by simulating its motion under different values of the parameters and identifying those that result in a simulation which matches the observed real motions. The problem is solved in a Bayesian optimization framework. The same framework is used for both identifying the model of an object online and searching for a policy that would minimize a given cost function according to the identified model. Experimental results both in simulation and using a real robot indicate that the proposed method outperforms state-of-the-art model-free reinforcement learning approaches.