Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Model Identification for Tensegrity Locomotion
Paper and Code
Apr 12, 2018
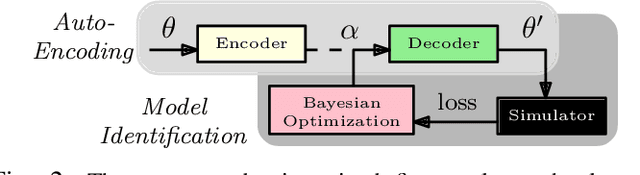
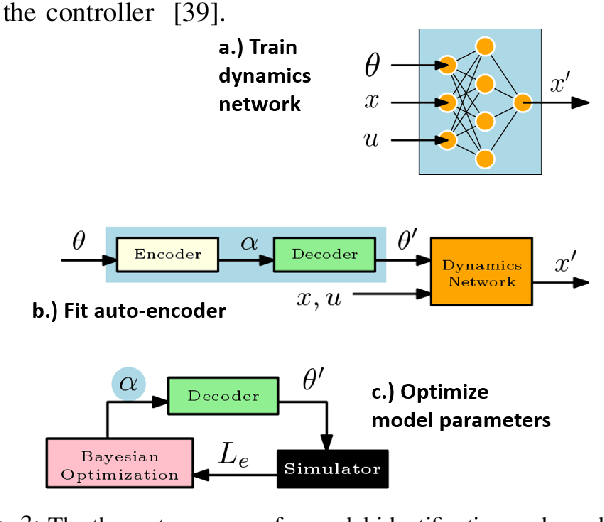
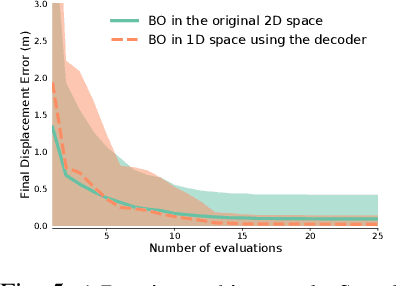
This paper aims to identify in a practical manner unknown physical parameters, such as mechanical models of actuated robot links, which are critical in dynamical robotic tasks. Key features include the use of an off-the-shelf physics engine and the Bayesian optimization framework. The task being considered is locomotion with a high-dimensional, compliant Tensegrity robot. A key insight, in this case, is the need to project the model identification challenge into an appropriate lower dimensional space for efficiency. Comparisons with alternatives indicate that the proposed method can identify the parameters more accurately within the given time budget, which also results in more precise locomotion control.
View paper on