 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTarget Curricula via Selection of Minimum Feature Sets: a Case Study in Boolean Networks
Nov 01, 2017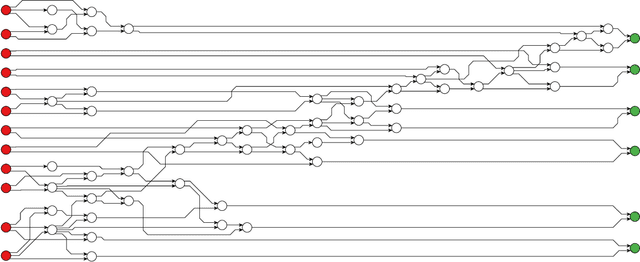
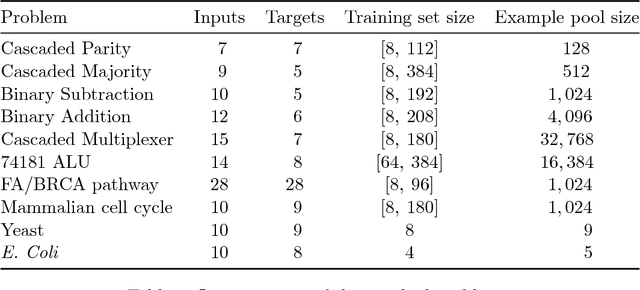
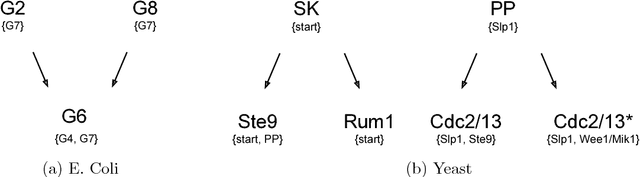
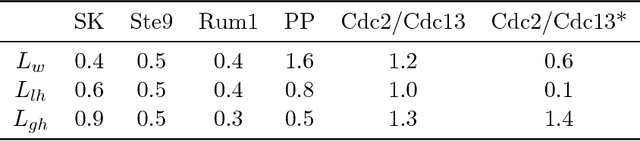
We consider the effect of introducing a curriculum of targets when training Boolean models on supervised Multi Label Classification (MLC) problems. In particular, we consider how to order targets in the absence of prior knowledge, and how such a curriculum may be enforced when using meta-heuristics to train discrete non-linear models. We show that hierarchical dependencies between targets can be exploited by enforcing an appropriate curriculum using hierarchical loss functions. On several multi output circuit-inference problems with known target difficulties, Feedforward Boolean Networks (FBNs) trained with such a loss function achieve significantly lower out-of-sample error, up to $10\%$ in some cases. This improvement increases as the loss places more emphasis on target order and is strongly correlated with an easy-to-hard curricula. We also demonstrate the same improvements on three real-world models and two Gene Regulatory Network (GRN) inference problems. We posit a simple a-priori method for identifying an appropriate target order and estimating the strength of target relationships in Boolean MLCs. These methods use intrinsic dimension as a proxy for target difficulty, which is estimated using optimal solutions to a combinatorial optimisation problem known as the Minimum-Feature-Set (minFS) problem. We also demonstrate that the same generalisation gains can be achieved without providing any knowledge of target difficulty.
Addressing the non-functional requirements of computer vision systems: A case study
Oct 31, 2014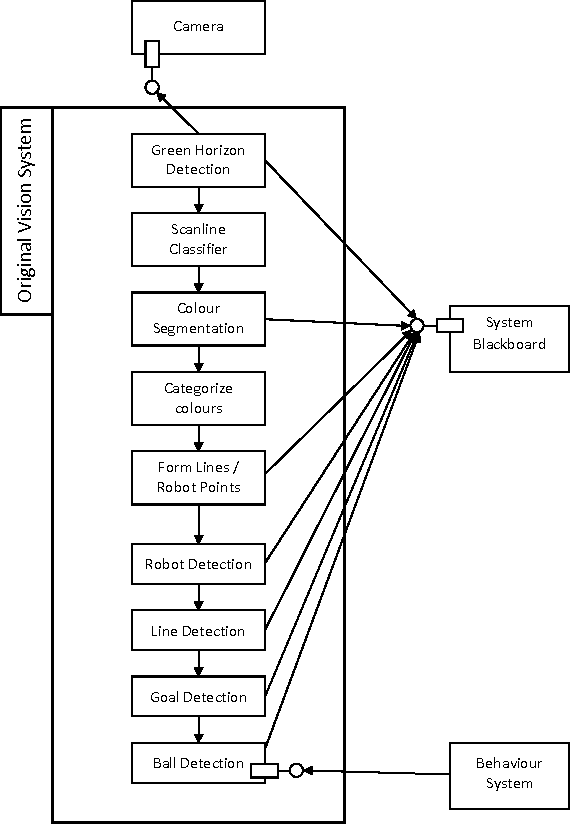
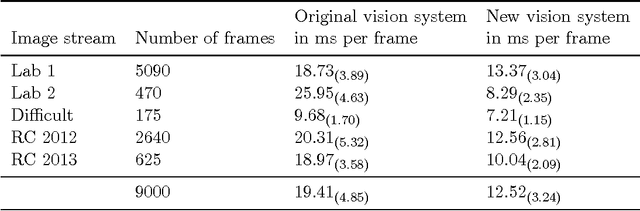
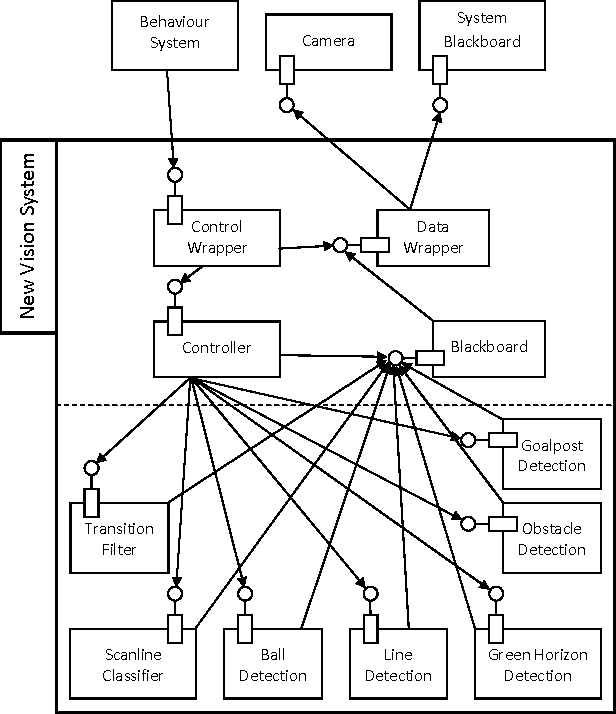
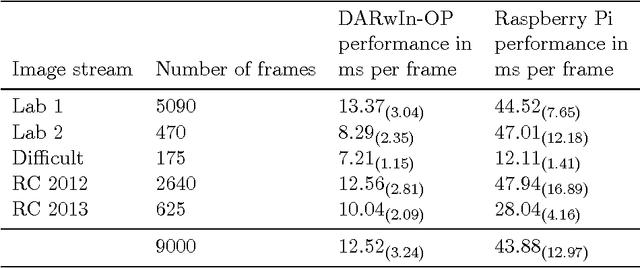
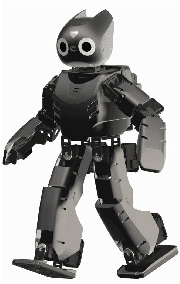
Computer vision plays a major role in the robotics industry, where vision data is frequently used for navigation and high-level decision making. Although there is significant research in algorithms and functional requirements, there is a comparative lack of emphasis on how best to map these abstract concepts onto an appropriate software architecture. In this study, we distinguish between the functional and non-functional requirements of a computer vision system. Using a RoboCup humanoid robot system as a case study, we propose and develop a software architecture that fulfills the latter criteria. The modifiability of the proposed architecture is demonstrated by detailing a number of feature detection algorithms and emphasizing which aspects of the underlying framework were modified to support their integration. To demonstrate portability, we port our vision system (designed for an application-specific DARwIn-OP humanoid robot) to a general-purpose, Raspberry Pi computer. We evaluate performance on both platforms and compare them to a vision system optimised for functional requirements only. The architecture and implementation presented in this study provide a highly generalisable framework for computer vision system design that is of particular benefit in research and development, competition and other environments in which rapid system evolution is necessary.
RANSAC: Identification of Higher-Order Geometric Features and Applications in Humanoid Robot Soccer
Oct 22, 2013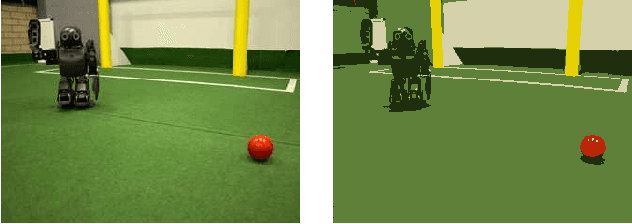
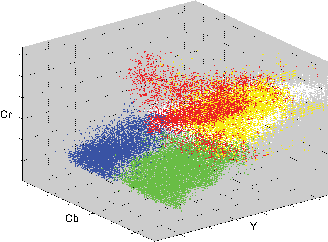
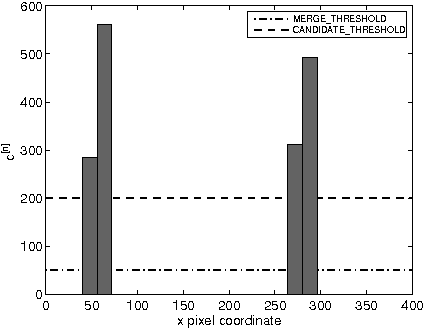
The ability for an autonomous agent to self-localise is directly proportional to the accuracy and precision with which it can perceive salient features within its local environment. The identification of such features by recognising geometric profile allows robustness against lighting variations, which is necessary in most industrial robotics applications. This paper details a framework by which the random sample consensus (RANSAC) algorithm, often applied to parameter fitting in linear models, can be extended to identify higher-order geometric features. Goalpost identification within humanoid robot soccer is investigated as an application, with the developed system yielding an order-of-magnitude improvement in classification performance relative to a traditional histogramming methodology.