 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAddressing the non-functional requirements of computer vision systems: A case study
Paper and Code
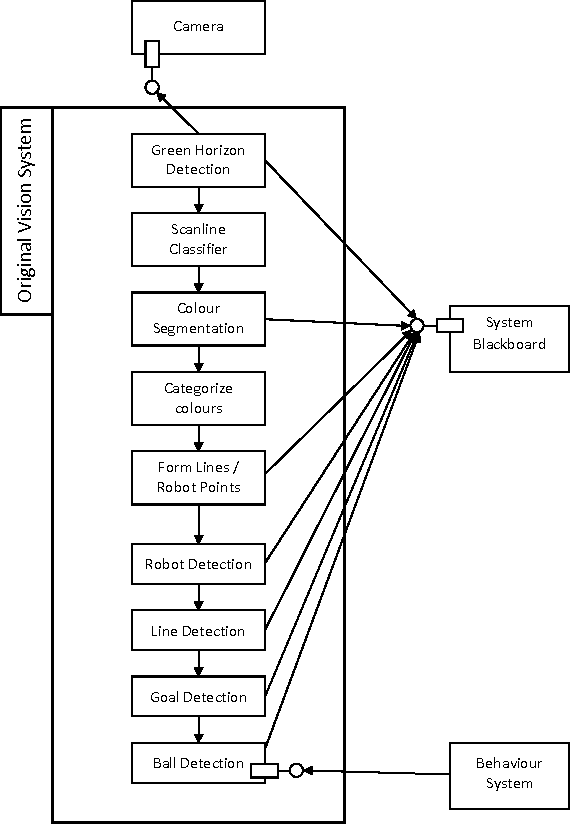
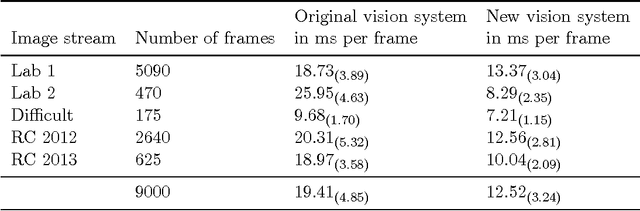
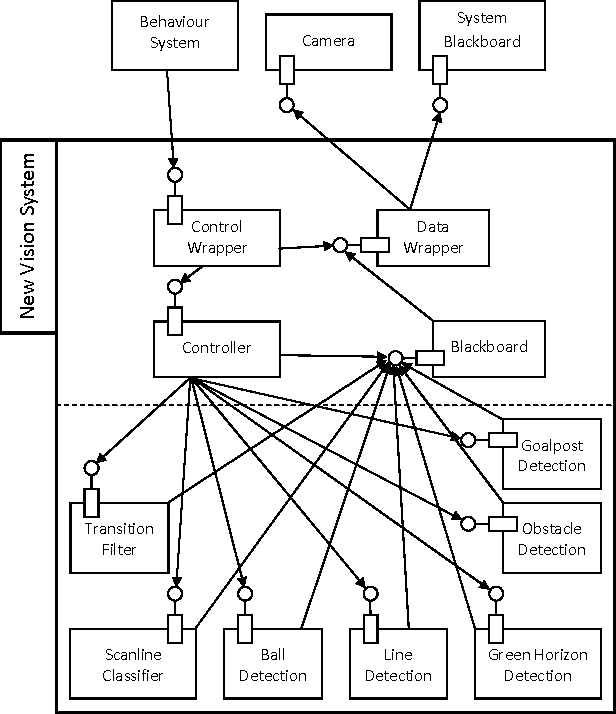
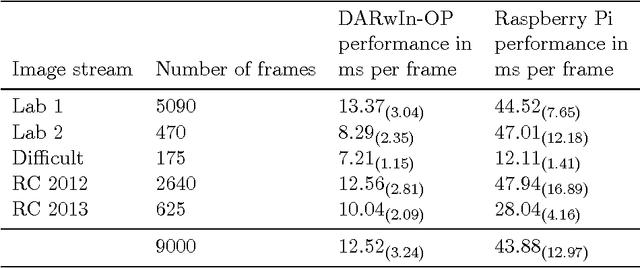
Computer vision plays a major role in the robotics industry, where vision data is frequently used for navigation and high-level decision making. Although there is significant research in algorithms and functional requirements, there is a comparative lack of emphasis on how best to map these abstract concepts onto an appropriate software architecture. In this study, we distinguish between the functional and non-functional requirements of a computer vision system. Using a RoboCup humanoid robot system as a case study, we propose and develop a software architecture that fulfills the latter criteria. The modifiability of the proposed architecture is demonstrated by detailing a number of feature detection algorithms and emphasizing which aspects of the underlying framework were modified to support their integration. To demonstrate portability, we port our vision system (designed for an application-specific DARwIn-OP humanoid robot) to a general-purpose, Raspberry Pi computer. We evaluate performance on both platforms and compare them to a vision system optimised for functional requirements only. The architecture and implementation presented in this study provide a highly generalisable framework for computer vision system design that is of particular benefit in research and development, competition and other environments in which rapid system evolution is necessary.