 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRANSAC: Identification of Higher-Order Geometric Features and Applications in Humanoid Robot Soccer
Oct 22, 2013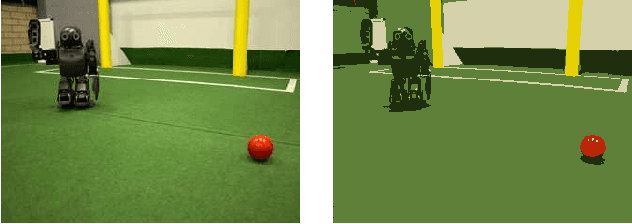
The ability for an autonomous agent to self-localise is directly proportional to the accuracy and precision with which it can perceive salient features within its local environment. The identification of such features by recognising geometric profile allows robustness against lighting variations, which is necessary in most industrial robotics applications. This paper details a framework by which the random sample consensus (RANSAC) algorithm, often applied to parameter fitting in linear models, can be extended to identify higher-order geometric features. Goalpost identification within humanoid robot soccer is investigated as an application, with the developed system yielding an order-of-magnitude improvement in classification performance relative to a traditional histogramming methodology.