 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalar Federated Learning for Linear Quadratic Regulator
Apr 06, 2026We propose ScalarFedLQR, a communication-efficient federated algorithm for model-free learning of a common policy in linear quadratic regulator (LQR) control of heterogeneous agents. The method builds on a decomposed projected gradient mechanism, in which each agent communicates only a scalar projection of a local zeroth-order gradient estimate. The server aggregates these scalar messages to reconstruct a global descent direction, reducing per-agent uplink communication from O(d) to O(1), independent of the policy dimension. Crucially, the projection-induced approximation error diminishes as the number of participating agents increases, yielding a favorable scaling law: larger fleets enable more accurate gradient recovery, admit larger stepsizes, and achieve faster linear convergence despite high dimensionality. Under standard regularity conditions, all iterates remain stabilizing and the average LQR cost decreases linearly fast. Numerical results demonstrate performance comparable to full-gradient federated LQR with substantially reduced communication.
Hereditary Geometric Meta-RL: Nonlocal Generalization via Task Symmetries
Feb 28, 2026Meta-Reinforcement Learning (Meta-RL) commonly generalizes via smoothness in the task encoding. While this enables local generalization around each training task, it requires dense coverage of the task space and leaves richer task space structure untapped. In response, we develop a geometric perspective that endows the task space with a "hereditary geometry" induced by the inherent symmetries of the underlying system. Concretely, the agent reuses a policy learned at the train time by transforming states and actions through actions of a Lie group. This converts Meta-RL into symmetry discovery rather than smooth extrapolation, enabling the agent to generalize to wider regions of the task space. We show that when the task space is inherited from the symmetries of the underlying system, the task space embeds into a subgroup of those symmetries whose actions are linearizable, connected, and compact--properties that enable efficient learning and inference at the test time. To learn these structures, we develop a differential symmetry discovery method. This collapses functional invariance constraints and thereby improves numerical stability and sample efficiency over functional approaches. Empirically, on a two-dimensional navigation task, our method efficiently recovers the ground-truth symmetry and generalizes across the entire task space, while a common baseline generalizes only near training tasks.
Learning Low-dimensional Latent Dynamics from High-dimensional Observations: Non-asymptotics and Lower Bounds
May 09, 2024
In this paper, we focus on learning a linear time-invariant (LTI) model with low-dimensional latent variables but high-dimensional observations. We provide an algorithm that recovers the high-dimensional features, i.e. column space of the observer, embeds the data into low dimensions and learns the low-dimensional model parameters. Our algorithm enjoys a sample complexity guarantee of order $\tilde{\mathcal{O}}(n/\epsilon^2)$, where $n$ is the observation dimension. We further establish a fundamental lower bound indicating this complexity bound is optimal up to logarithmic factors and dimension-independent constants. We show that this inevitable linear factor of $n$ is due to the learning error of the observer's column space in the presence of high-dimensional noise. Extending our results, we consider a meta-learning problem inspired by various real-world applications, where the observer column space can be collectively learned from datasets of multiple LTI systems. An end-to-end algorithm is then proposed, facilitating learning LTI systems from a meta-dataset which breaks the sample complexity lower bound in certain scenarios.
Duality-Based Stochastic Policy Optimization for Estimation with Unknown Noise Covariances
Oct 26, 2022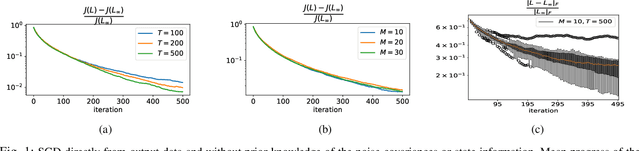
Duality of control and estimation allows mapping recent advances in data-guided control to the estimation setup. This paper formalizes and utilizes such a mapping by considering learning the optimal (steady-state) Kalman gain when process and measurement noise statistics are unknown. Specifically, building on the duality between synthesizing optimal control and estimation gains, the filter design problem is formalized as direct policy learning; subsequently, a Stochastic Gradient Descent (SGD) approach is adopted to learn the optimal filter gain. In this direction, control and estimation duality is also used to extend existing theoretical results for direct policy updates for Linear Quadratic Regulator (LQR) to establish convergence of the proposed algorithm-while addressing subtle differences between the two synthesis problems. The results are illustrated via several numerical examples.
Deep Learning-based Resource Allocation for Infrastructure Resilience
Jul 12, 2020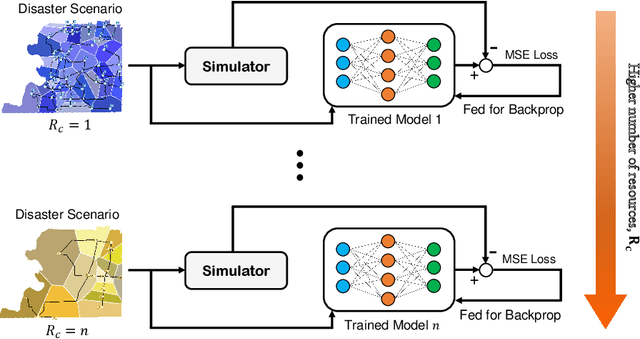
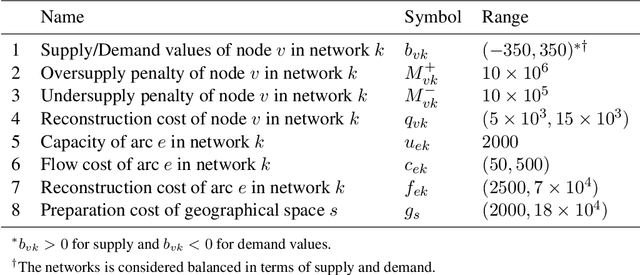
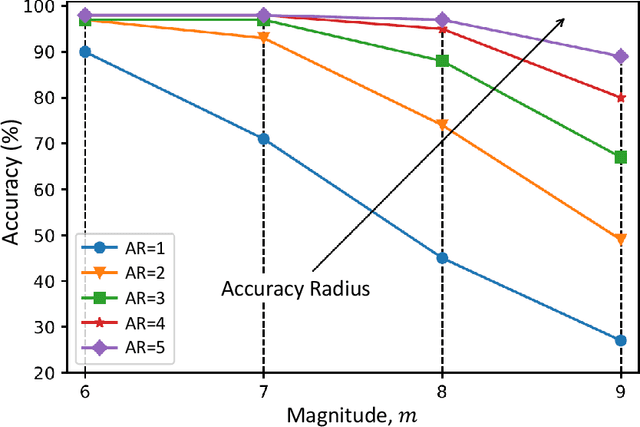
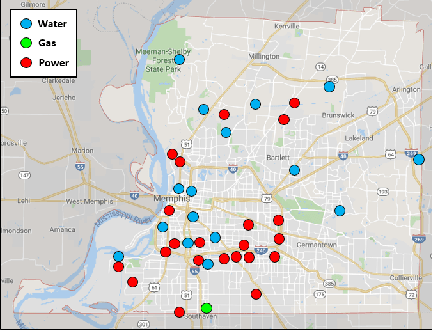
From an optimization point of view, resource allocation is one of the cornerstones of research for addressing limiting factors commonly arising in applications such as power outages and traffic jams. In this paper, we take a data-driven approach to estimate an optimal nodal restoration sequence for immediate recovery of the infrastructure networks after natural disasters such as earthquakes. We generate data from td-INDP, a high-fidelity simulator of optimal restoration strategies for interdependent networks, and employ deep neural networks to approximate those strategies. Despite the fact that the underlying problem is NP-complete, the restoration sequences obtained by our method are observed to be nearly optimal. In addition, by training multiple models---the so-called estimators---for a variety of resource availability levels, our proposed method balances a trade-off between resource utilization and restoration time. Decision-makers can use our trained models to allocate resources more efficiently after contingencies, and in turn, improve the community resilience. Besides their predictive power, such trained estimators unravel the effect of interdependencies among different nodal functionalities in the restoration strategies. We showcase our methodology by the real-world interdependent infrastructure of Shelby County, TN.
Online Regulation of Unstable LTI Systems from a Single Trajectory
Jun 09, 2020
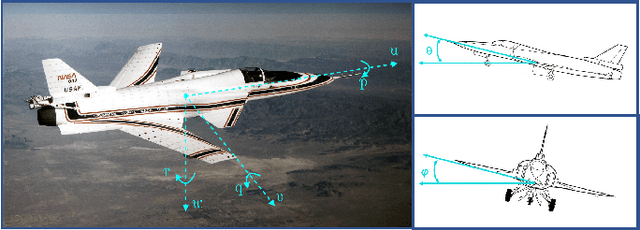
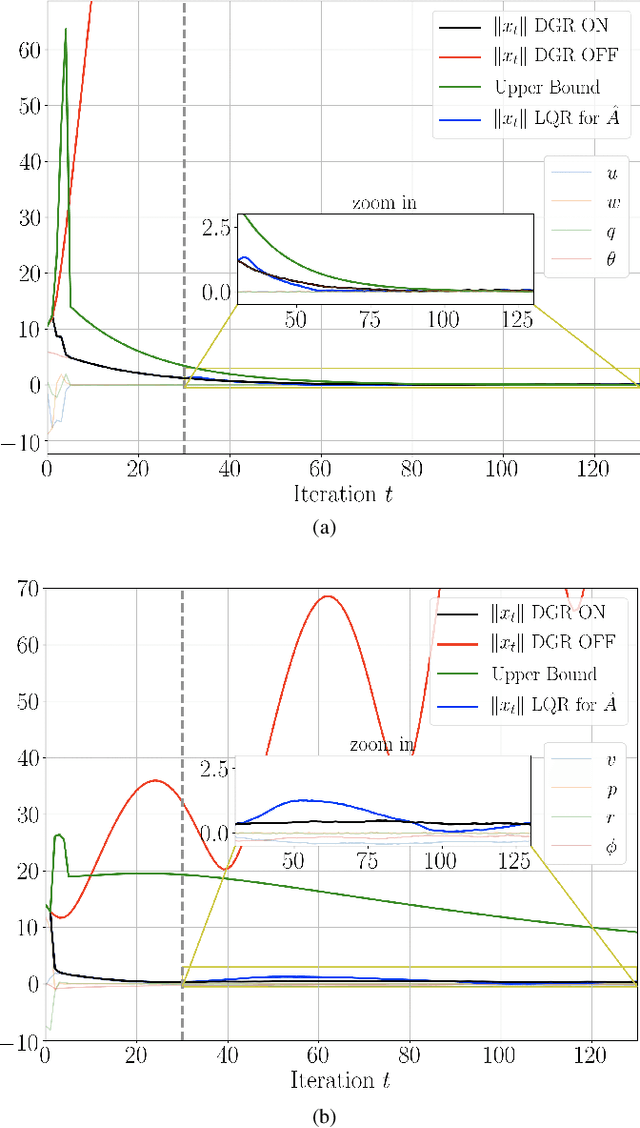
Recently, data-driven methods for control of dynamic systems have received considerable attention in system theory and machine learning as they provide a mechanism for feedback synthesis from the observed time-series data. However learning, say through direct policy updates, often requires assumptions such as knowing a priori that the initial policy (gain) is stabilizing, e.g., when the open-loop system is stable. In this paper, we examine online regulation of (possibly unstable) partially unknown linear systems with no a priori assumptions on the initial controller. First, we introduce and characterize the notion of ''regularizability'' for linear systems that gauges the capacity of a system to be regulated in finite-time in contrast to its asymptotic behavior (commonly characterized by stabilizability/controllability). Next, having access only to the input matrix, we propose the Data-GuidedRegulation (DGR) synthesis that--as its name suggests--regulates the underlying states while also generating informative data that can subsequently be used for data-driven stabilization or system identification (sysID). The analysis is also related in spirit, to thespectrum and the ''instability number'' of the underlying linear system, a novel geometric property studied in this work. We further elucidate our results by considering special structures for system parameters as well as boosting the performance of the algorithm via a rank-one matrix update using the discrete nature of data collection in the problem setup. Finally, we demonstrate the utility of the proposed approach via an example involving direct (online) regulation of the X-29 aircraft.