 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrada-LLM: Graph LLM for traffic prediction
Oct 28, 2024



Traffic prediction is a vital component of intelligent transportation systems. By reasoning about traffic patterns in both the spatial and temporal dimensions, accurate and interpretable predictions can be provided. A considerable challenge in traffic prediction lies in handling the diverse data distributions caused by vastly different traffic conditions occurring at different locations. LLMs have been a dominant solution due to their remarkable capacity to adapt to new datasets with very few labeled data samples, i.e., few-shot adaptability. However, existing forecasting techniques mainly focus on extracting local graph information and forming a text-like prompt, leaving LLM- based traffic prediction an open problem. This work presents a probabilistic LLM for traffic forecasting with three highlights. We propose a graph-aware LLM for traffic prediction that considers proximal traffic information. Specifically, by considering the traffic of neighboring nodes as covariates, our model outperforms the corresponding time-series LLM. Furthermore, we adopt a lightweight approach for efficient domain adaptation when facing new data distributions in few-shot fashion. The comparative experiment demonstrates the proposed method outperforms the state-of-the-art LLM-based methods and the traditional GNN- based supervised approaches. Furthermore, Strada-LLM can be easily adapted to different LLM backbones without a noticeable performance drop.
GINTRIP: Interpretable Temporal Graph Regression using Information bottleneck and Prototype-based method
Sep 17, 2024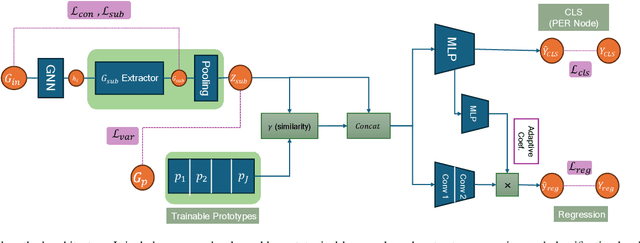
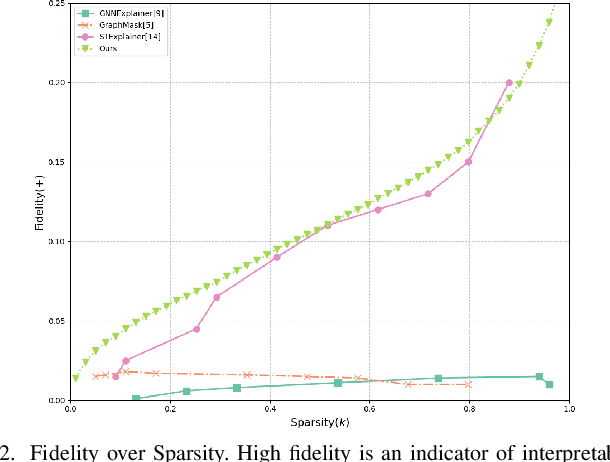
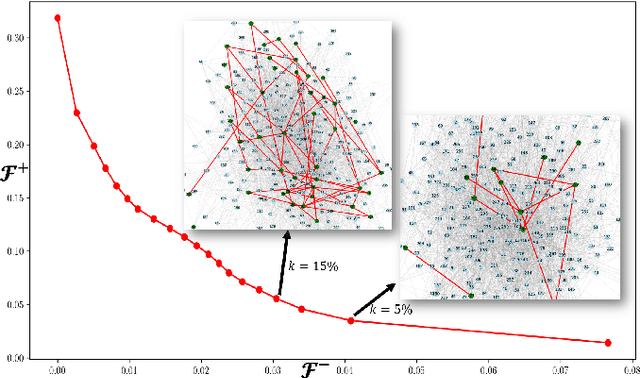

Deep neural networks (DNNs) have demonstrated remarkable performance across various domains, yet their application to temporal graph regression tasks faces significant challenges regarding interpretability. This critical issue, rooted in the inherent complexity of both DNNs and underlying spatio-temporal patterns in the graph, calls for innovative solutions. While interpretability concerns in Graph Neural Networks (GNNs) mirror those of DNNs, to the best of our knowledge, no notable work has addressed the interpretability of temporal GNNs using a combination of Information Bottleneck (IB) principles and prototype-based methods. Our research introduces a novel approach that uniquely integrates these techniques to enhance the interpretability of temporal graph regression models. The key contributions of our work are threefold: We introduce the \underline{G}raph \underline{IN}terpretability in \underline{T}emporal \underline{R}egression task using \underline{I}nformation bottleneck and \underline{P}rototype (GINTRIP) framework, the first combined application of IB and prototype-based methods for interpretable temporal graph tasks. We derive a novel theoretical bound on mutual information (MI), extending the applicability of IB principles to graph regression tasks. We incorporate an unsupervised auxiliary classification head, fostering multi-task learning and diverse concept representation, which enhances the model bottleneck's interpretability. Our model is evaluated on real-world traffic datasets, outperforming existing methods in both forecasting accuracy and interpretability-related metrics.