 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocally Adaptive One-Class Classifier Fusion with Dynamic $\ell$p-Norm Constraints for Robust Anomaly Detection
Nov 20, 2024
This paper presents a novel approach to one-class classifier fusion through locally adaptive learning with dynamic $\ell$p-norm constraints. We introduce a framework that dynamically adjusts fusion weights based on local data characteristics, addressing fundamental challenges in ensemble-based anomaly detection. Our method incorporates an interior-point optimization technique that significantly improves computational efficiency compared to traditional Frank-Wolfe approaches, achieving up to 19-fold speed improvements in complex scenarios. The framework is extensively evaluated on standard UCI benchmark datasets and specialized temporal sequence datasets, demonstrating superior performance across diverse anomaly types. Statistical validation through Skillings-Mack tests confirms our method's significant advantages over existing approaches, with consistent top rankings in both pure and non-pure learning scenarios. The framework's ability to adapt to local data patterns while maintaining computational efficiency makes it particularly valuable for real-time applications where rapid and accurate anomaly detection is crucial.
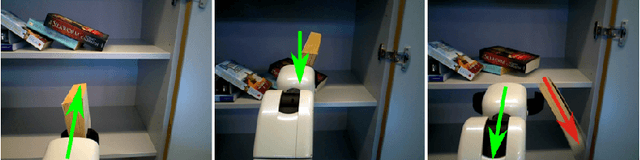
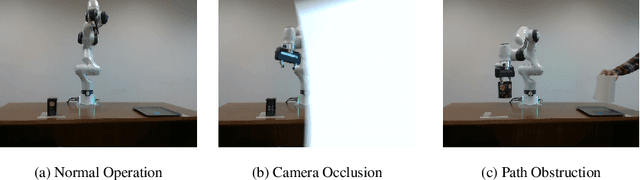
Interpretable Responsibility Sharing as a Heuristic for Task and Motion Planning
Sep 09, 2024
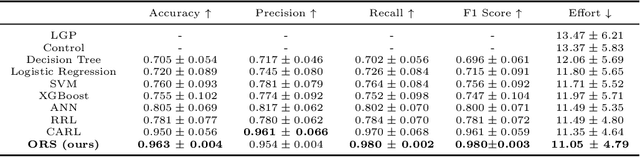
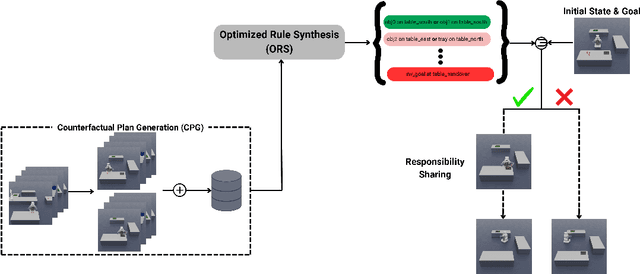

This article introduces a novel heuristic for Task and Motion Planning (TAMP) named Interpretable Responsibility Sharing (IRS), which enhances planning efficiency in domestic robots by leveraging human-constructed environments and inherent biases. Utilizing auxiliary objects (e.g., trays and pitchers), which are commonly found in household settings, IRS systematically incorporates these elements to simplify and optimize task execution. The heuristic is rooted in the novel concept of Responsibility Sharing (RS), where auxiliary objects share the task's responsibility with the embodied agent, dividing complex tasks into manageable sub-problems. This division not only reflects human usage patterns but also aids robots in navigating and manipulating within human spaces more effectively. By integrating Optimized Rule Synthesis (ORS) for decision-making, IRS ensures that the use of auxiliary objects is both strategic and context-aware, thereby improving the interpretability and effectiveness of robotic planning. Experiments conducted across various household tasks demonstrate that IRS significantly outperforms traditional methods by reducing the effort required in task execution and enhancing the overall decision-making process. This approach not only aligns with human intuitive methods but also offers a scalable solution adaptable to diverse domestic environments. Code is available at https://github.com/asyncs/IRS.
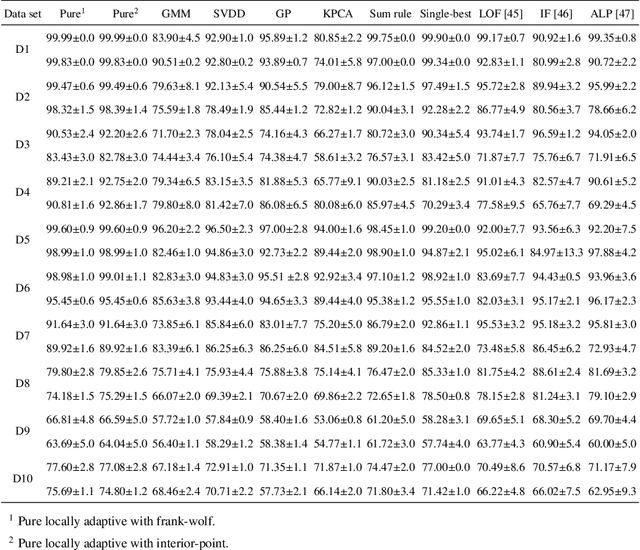
Lp-Norm Constrained One-Class Classifier Combination
Dec 25, 2023Classifier fusion is established as an effective methodology for boosting performance in different settings and one-class classification is no exception. In this study, we consider the one-class classifier fusion problem by modelling the sparsity/uniformity of the ensemble. To this end, we formulate a convex objective function to learn the weights in a linear ensemble model and impose a variable Lp-norm constraint on the weight vector. The vector-norm constraint enables the model to adapt to the intrinsic uniformity/sparsity of the ensemble in the space of base learners and acts as a (soft) classifier selection mechanism by shaping the relative magnitudes of fusion weights. Drawing on the Frank-Wolfe algorithm, we then present an effective approach to solve the formulated convex constrained optimisation problem efficiently. We evaluate the proposed one-class classifier combination approach on multiple data sets from diverse application domains and illustrate its merits in comparison to the existing approaches.