 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Responsibility Sharing as a Heuristic for Task and Motion Planning
Paper and Code

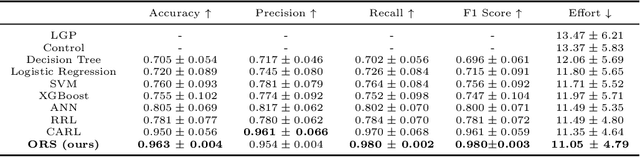
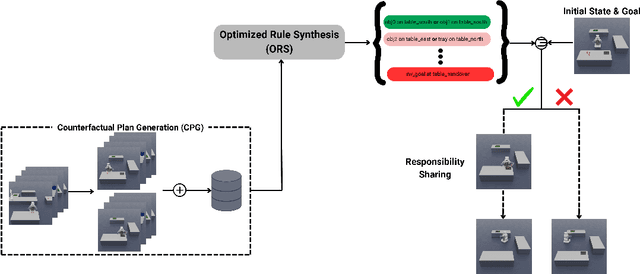

This article introduces a novel heuristic for Task and Motion Planning (TAMP) named Interpretable Responsibility Sharing (IRS), which enhances planning efficiency in domestic robots by leveraging human-constructed environments and inherent biases. Utilizing auxiliary objects (e.g., trays and pitchers), which are commonly found in household settings, IRS systematically incorporates these elements to simplify and optimize task execution. The heuristic is rooted in the novel concept of Responsibility Sharing (RS), where auxiliary objects share the task's responsibility with the embodied agent, dividing complex tasks into manageable sub-problems. This division not only reflects human usage patterns but also aids robots in navigating and manipulating within human spaces more effectively. By integrating Optimized Rule Synthesis (ORS) for decision-making, IRS ensures that the use of auxiliary objects is both strategic and context-aware, thereby improving the interpretability and effectiveness of robotic planning. Experiments conducted across various household tasks demonstrate that IRS significantly outperforms traditional methods by reducing the effort required in task execution and enhancing the overall decision-making process. This approach not only aligns with human intuitive methods but also offers a scalable solution adaptable to diverse domestic environments. Code is available at https://github.com/asyncs/IRS.