 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Efficient Prediction-Powered Calibration via Cross-Validation
Jul 27, 2025Calibration data are necessary to formally quantify the uncertainty of the decisions produced by an existing artificial intelligence (AI) model. To overcome the common issue of scarce calibration data, a promising approach is to employ synthetic labels produced by a (generally different) predictive model. However, fine-tuning the label-generating predictor on the inference task of interest, as well as estimating the residual bias of the synthetic labels, demand additional data, potentially exacerbating the calibration data scarcity problem. This paper introduces a novel approach that efficiently utilizes limited calibration data to simultaneously fine-tune a predictor and estimate the bias of the synthetic labels. The proposed method yields prediction sets with rigorous coverage guarantees for AI-generated decisions. Experimental results on an indoor localization problem validate the effectiveness and performance gains of our solution.
RIS-assisted ISAC Systems for Industrial Revolution 6.0: Exploring the Near-field and Far-field Coexistence
Jul 10, 2025



The Industrial Internet of Things (IIoT) has emerged as a key technology for realizing the vision of Industry 6.0, requiring the seamless integration of diverse connected devices. In particular, integrated sensing and communication (ISAC) plays a critical role in supporting real-time control and automation within IIoT systems. In this paper, we explore reconfigurable intelligent surface (RIS)-assisted ISAC systems for IIoT in the coexistence of near-field and far-field regions. The system consists of a full-duplex access point (AP), a RIS and multiple IIoT devices, where the near-field devices simultaneously perform sensing and communication, while the far-field devices rely on a RIS-assisted communication. To enhance spectral efficiency for both sensing and communication functionalities, we consider the use of both traditional sensing-only (SO) and ISAC frequency bands. Moreover, uplink non-orthogonal multiple access (NOMA) is employed to facilitate the sequential decoding of superimposed communication and sensing signals from IIoT devices. To maximize sensing accuracy in terms of Cram${\Grave{\textrm{e}}}$r-Rao bound (CRB), we formulate a joint optimization of RIS phase shift, bandwidth splitting ratio and receive beamforming vector subject to the minimum data rate requirements of IIoT devices and resource budget constraints. The algorithmic solution is developed via the successive convex approximation (SCA)-based alternating optimization (AO) method with the semi-definite relaxation (SDR) technique. Numerical results demonstrate that the proposed method significantly outperforms conventional methods relying solely on either ISAC or SO band by achieving superior performance across RIS and device configurations, while ensuring robust ISAC performance under the near-field and far-field coexistence scenarios.
Calibrating Wireless AI via Meta-Learned Context-Dependent Conformal Prediction
Jan 24, 2025Modern software-defined networks, such as Open Radio Access Network (O-RAN) systems, rely on artificial intelligence (AI)-powered applications running on controllers interfaced with the radio access network. To ensure that these AI applications operate reliably at runtime, they must be properly calibrated before deployment. A promising and theoretically grounded approach to calibration is conformal prediction (CP), which enhances any AI model by transforming it into a provably reliable set predictor that provides error bars for estimates and decisions. CP requires calibration data that matches the distribution of the environment encountered during runtime. However, in practical scenarios, network controllers often have access only to data collected under different contexts -- such as varying traffic patterns and network conditions -- leading to a mismatch between the calibration and runtime distributions. This paper introduces a novel methodology to address this calibration-test distribution shift. The approach leverages meta-learning to develop a zero-shot estimator of distribution shifts, relying solely on contextual information. The proposed method, called meta-learned context-dependent weighted conformal prediction (ML-WCP), enables effective calibration of AI applications without requiring data from the current context. Additionally, it can incorporate data from multiple contexts to further enhance calibration reliability.
Cache-assisted Mobile Edge Computing over Space-Air-Ground Integrated Networks for Extended Reality Applications
Sep 08, 2023Extended reality-enabled Internet of Things (XRI) provides the new user experience and the sense of immersion by adding virtual elements to the real world through Internet of Things (IoT) devices and emerging 6G technologies. However, the computational-intensive XRI tasks are challenging for the energy-constrained small-size XRI devices to cope with, and moreover certain data requires centralized computing that needs to be shared among users. To this end, we propose a cache-assisted space-air-ground integrated network mobile edge computing (SAGIN-MEC) system for XRI applications, consisting of two types of edge servers mounted on an unmanned aerial vehicle (UAV) and low Earth orbit (LEO) equipped with cache and the multiple ground XRI devices. For system efficiency, the four different offloading procedures of the XRI data are considered according to the type of information, i.e., shared data and private data, as well as the offloading decision and the caching status. Specifically, the private data can be offloaded to either UAV or LEO, while the offloading decision of the shared data to the LEO can be determined by the caching status. With the aim of maximizing the energy efficiency of the overall system, we jointly optimize UAV trajectory, resource allocation and offloading decisions under latency constraints and UAV's operational limitations by using the alternating optimization (AO)-based method along with Dinkelbach algorithm and successive convex optimization (SCA). Via numerical results, the proposed algorithm is verified to have the superior performance compared to conventional partial optimizations or without cache.
Hybrid UAV-enabled Secure Offloading via Deep Reinforcement Learning
Aug 16, 2022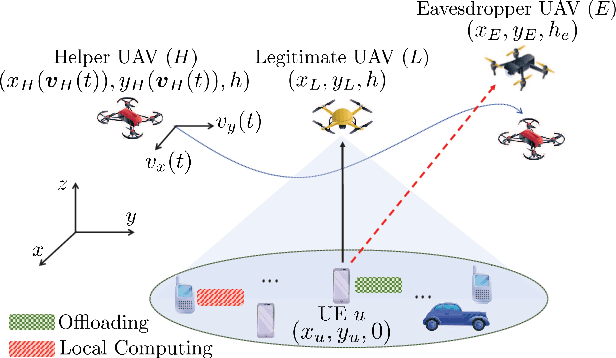
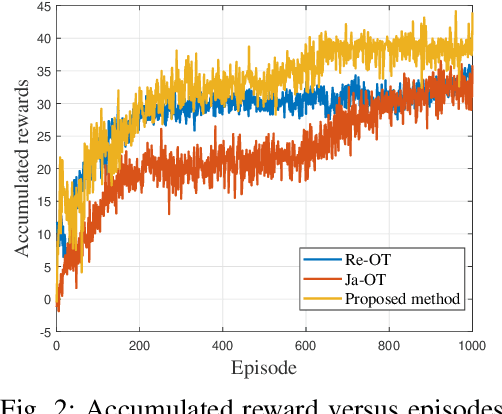
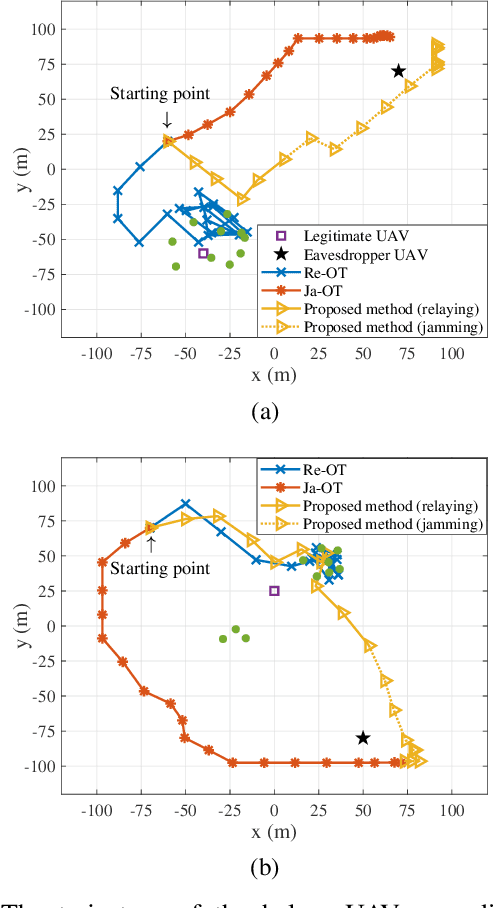
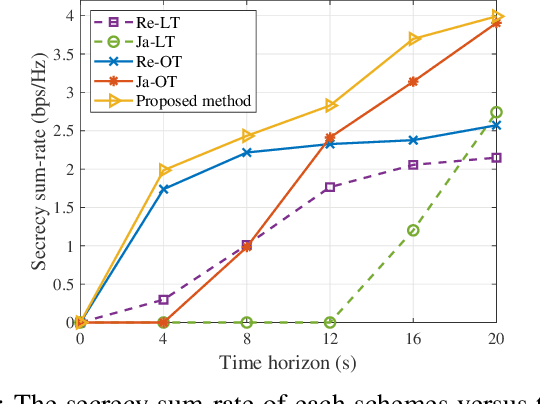
Unmanned aerial vehicles (UAVs) have been actively studied as moving cloudlets to provide application offloading opportunities and to enhance the security level of user equipments (UEs). In this correspondence, we propose a hybrid UAV-aided secure offloading system in which a UAV serves as a helper by switching the mode between jamming and relaying to maximize the secrecy sum-rate of UEs. This work aims to optimize (i) the trajectory of the helper UAV, (ii) the mode selection strategy and (iii) the UEs' offloading decisions under the constraints of offloading accomplishment and the UAV's operational limitations. The solution is provided via a deep deterministic policy gradient (DDPG)-based method, whose superior performance is verified via a numerical simulation and compared to those of traditional approaches.