 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrackletMapper: Ground Surface Segmentation and Mapping from Traffic Participant Trajectories
Sep 16, 2022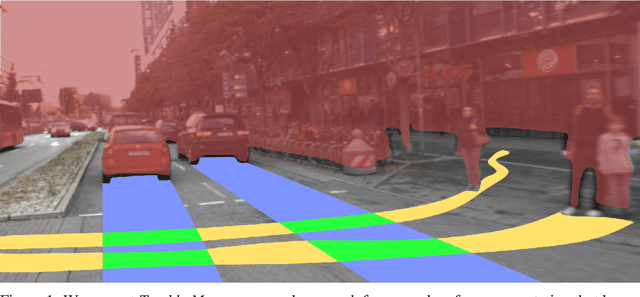
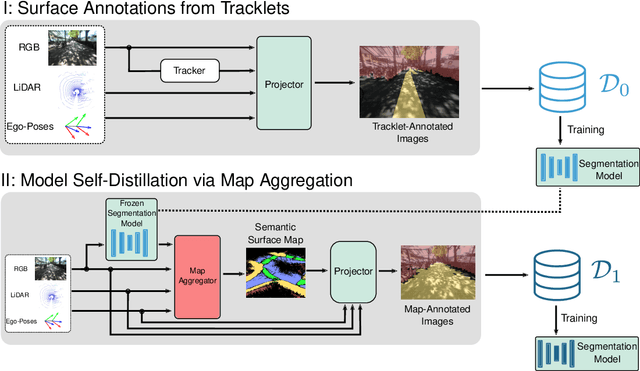
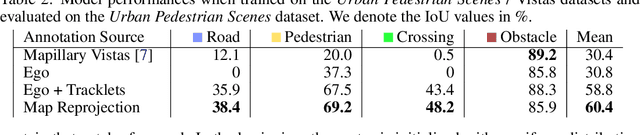
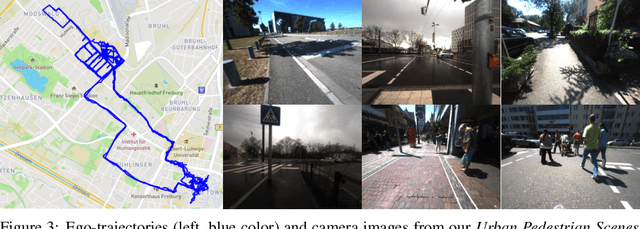
Robustly classifying ground infrastructure such as roads and street crossings is an essential task for mobile robots operating alongside pedestrians. While many semantic segmentation datasets are available for autonomous vehicles, models trained on such datasets exhibit a large domain gap when deployed on robots operating in pedestrian spaces. Manually annotating images recorded from pedestrian viewpoints is both expensive and time-consuming. To overcome this challenge, we propose TrackletMapper, a framework for annotating ground surface types such as sidewalks, roads, and street crossings from object tracklets without requiring human-annotated data. To this end, we project the robot ego-trajectory and the paths of other traffic participants into the ego-view camera images, creating sparse semantic annotations for multiple types of ground surfaces from which a ground segmentation model can be trained. We further show that the model can be self-distilled for additional performance benefits by aggregating a ground surface map and projecting it into the camera images, creating a denser set of training annotations compared to the sparse tracklet annotations. We qualitatively and quantitatively attest our findings on a novel large-scale dataset for mobile robots operating in pedestrian areas. Code and dataset will be made available at http://trackletmapper.cs.uni-freiburg.de.
Power to the Relational Inductive Bias: Graph Neural Networks in Electrical Power Grids
Sep 08, 2021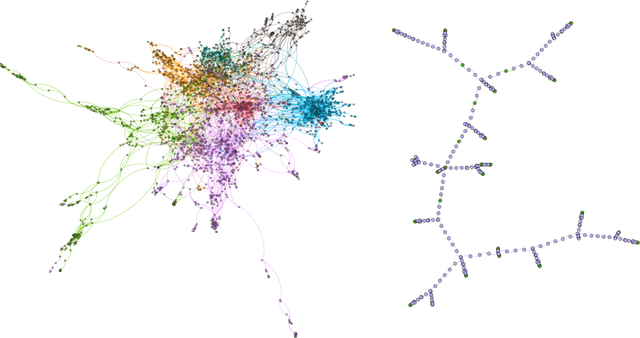

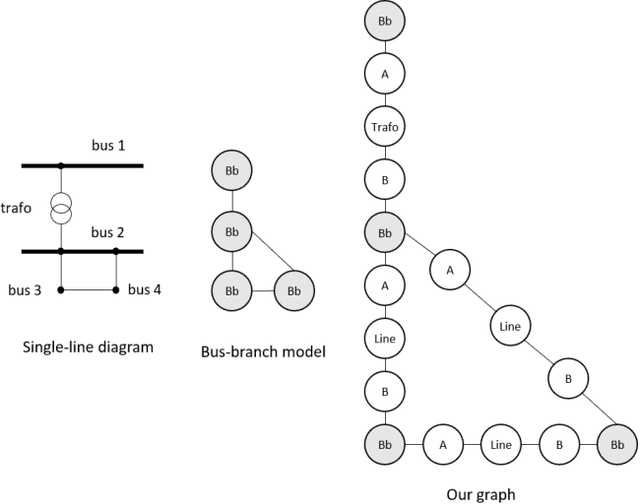
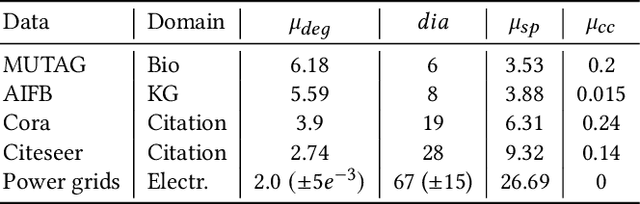
The application of graph neural networks (GNNs) to the domain of electrical power grids has high potential impact on smart grid monitoring. Even though there is a natural correspondence of power flow to message-passing in GNNs, their performance on power grids is not well-understood. We argue that there is a gap between GNN research driven by benchmarks which contain graphs that differ from power grids in several important aspects. Additionally, inductive learning of GNNs across multiple power grid topologies has not been explored with real-world data. We address this gap by means of (i) defining power grid graph datasets in inductive settings, (ii) an exploratory analysis of graph properties, and (iii) an empirical study of the concrete learning task of state estimation on real-world power grids. Our results show that GNNs are more robust to noise with up to 400% lower error compared to baselines. Furthermore, due to the unique properties of electrical grids, we do not observe the well known over-smoothing phenomenon of GNNs and find the best performing models to be exceptionally deep with up to 13 layers. This is in stark contrast to existing benchmark datasets where the consensus is that 2 to 3 layer GNNs perform best. Our results demonstrate that a key challenge in this domain is to effectively handle long-range dependence.