 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating the Impact of Advanced LLM Techniques on AI-Lecture Tutors for a Robotics Course
Aug 02, 2024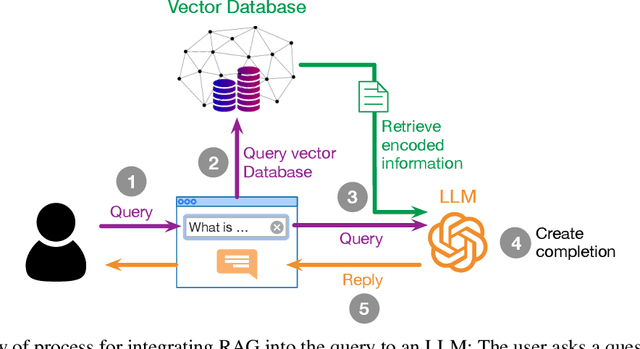
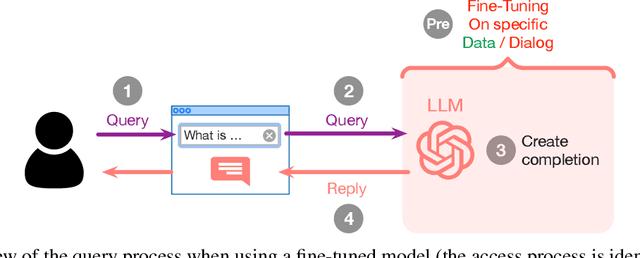
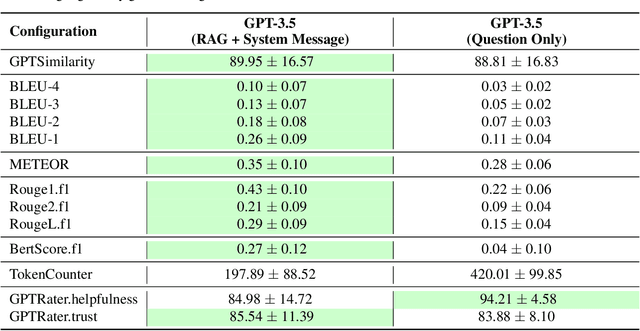
This study evaluates the performance of Large Language Models (LLMs) as an Artificial Intelligence-based tutor for a university course. In particular, different advanced techniques are utilized, such as prompt engineering, Retrieval-Augmented-Generation (RAG), and fine-tuning. We assessed the different models and applied techniques using common similarity metrics like BLEU-4, ROUGE, and BERTScore, complemented by a small human evaluation of helpfulness and trustworthiness. Our findings indicate that RAG combined with prompt engineering significantly enhances model responses and produces better factual answers. In the context of education, RAG appears as an ideal technique as it is based on enriching the input of the model with additional information and material which usually is already present for a university course. Fine-tuning, on the other hand, can produce quite small, still strong expert models, but poses the danger of overfitting. Our study further asks how we measure performance of LLMs and how well current measurements represent correctness or relevance? We find high correlation on similarity metrics and a bias of most of these metrics towards shorter responses. Overall, our research points to both the potential and challenges of integrating LLMs in educational settings, suggesting a need for balanced training approaches and advanced evaluation frameworks.
Towards autonomous artificial agents with an active self: modeling sense of control in situated action
Dec 10, 2021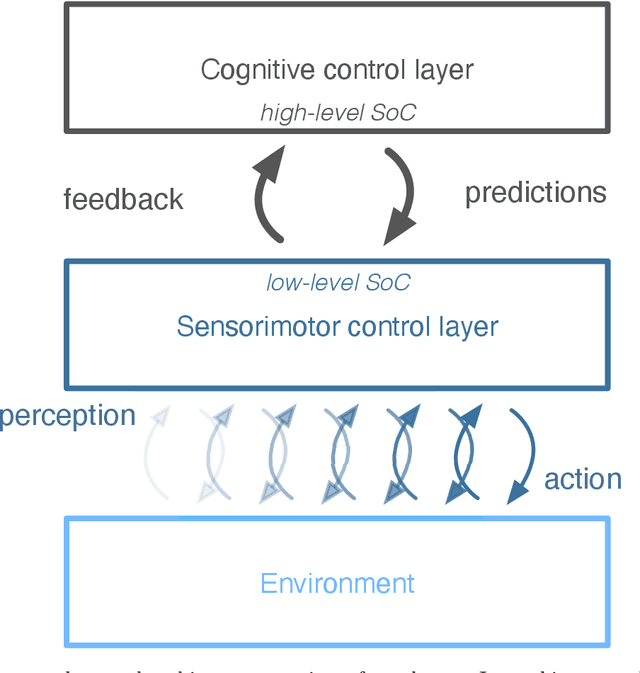

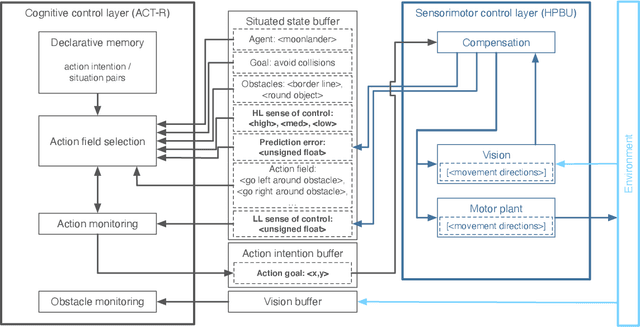

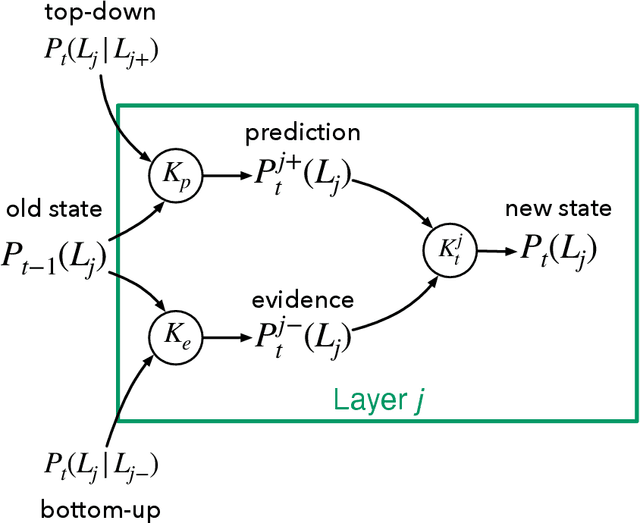
In this paper we present a computational modeling account of an active self in artificial agents. In particular we focus on how an agent can be equipped with a sense of control and how it arises in autonomous situated action and, in turn, influences action control. We argue that this requires laying out an embodied cognitive model that combines bottom-up processes (sensorimotor learning and fine-grained adaptation of control) with top-down processes (cognitive processes for strategy selection and decision-making). We present such a conceptual computational architecture based on principles of predictive processing and free energy minimization. Using this general model, we describe how a sense of control can form across the levels of a control hierarchy and how this can support action control in an unpredictable environment. We present an implementation of this model as well as first evaluations in a simulated task scenario, in which an autonomous agent has to cope with un-/predictable situations and experiences corresponding sense of control. We explore different model parameter settings that lead to different ways of combining low-level and high-level action control. The results show the importance of appropriately weighting information in situations where the need for low/high-level action control varies and they demonstrate how the sense of control can facilitate this.
Resonating Minds -- Emergent Collaboration Through Hierarchical Active Inference
Dec 02, 2021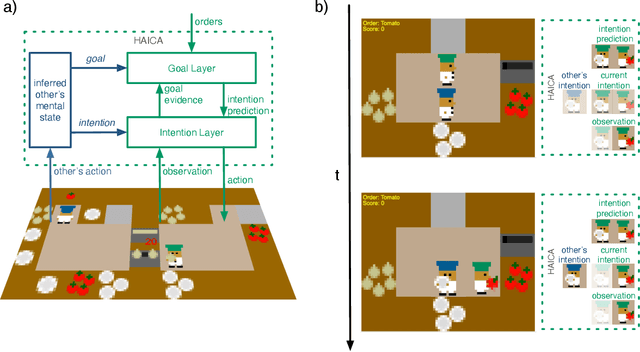
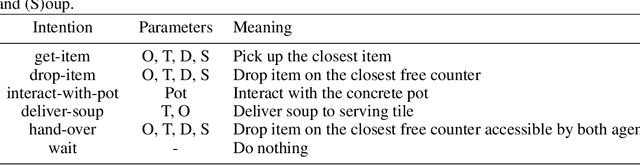
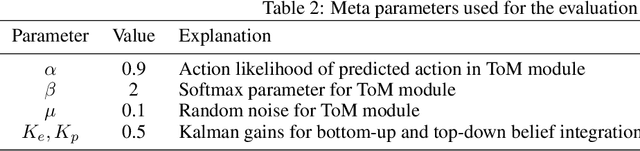
Working together on complex collaborative tasks requires agents to coordinate their actions. Doing this explicitly or completely prior to the actual interaction is not always possible nor sufficient. Agents also need to continuously understand the current actions of others and quickly adapt their own behavior appropriately. Here we investigate how efficient, automatic coordination processes at the level of mental states (intentions, goals), which we call belief resonance, can lead to collaborative situated problem-solving. We present a model of hierarchical active inference for collaborative agents (HAICA). It combines efficient Bayesian Theory of Mind processes with a perception-action system based on predictive processing and active inference. Belief resonance is realized by letting the inferred mental states of one agent influence another agent's predictive beliefs about its own goals and intentions. This way, the inferred mental states influence the agent's own task behavior without explicit collaborative reasoning. We implement and evaluate this model in the Overcooked domain, in which two agents with varying degrees of belief resonance team up to fulfill meal orders. Our results demonstrate that agents based on HAICA achieve a team performance comparable to recent state of the art approaches, while incurring much lower computational costs. We also show that belief resonance is especially beneficial in settings were the agents have asymmetric knowledge about the environment. The results indicate that belief resonance and active inference allow for quick and efficient agent coordination, and thus can serve as a building block for collaborative cognitive agents.
A predictive processing model of perception and action for self-other distinction
Oct 24, 2018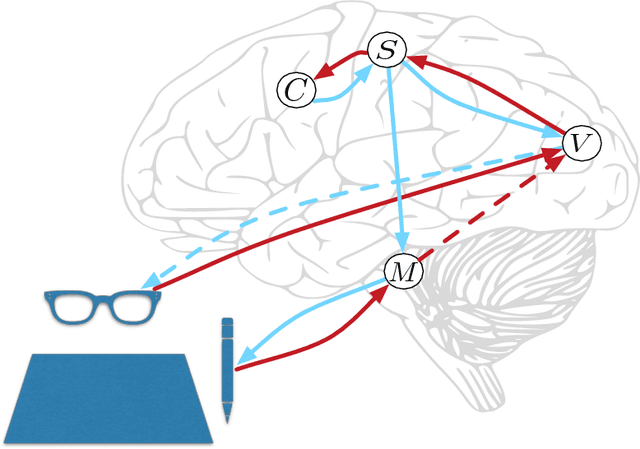
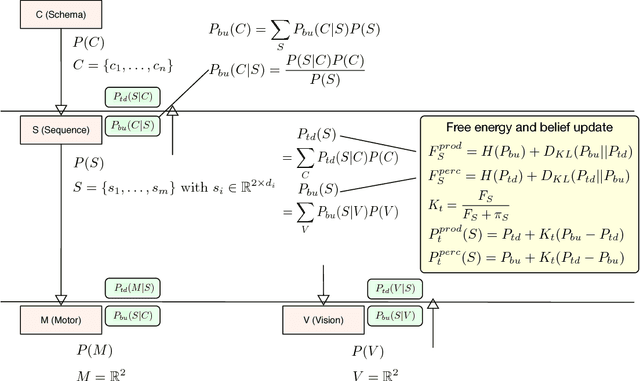
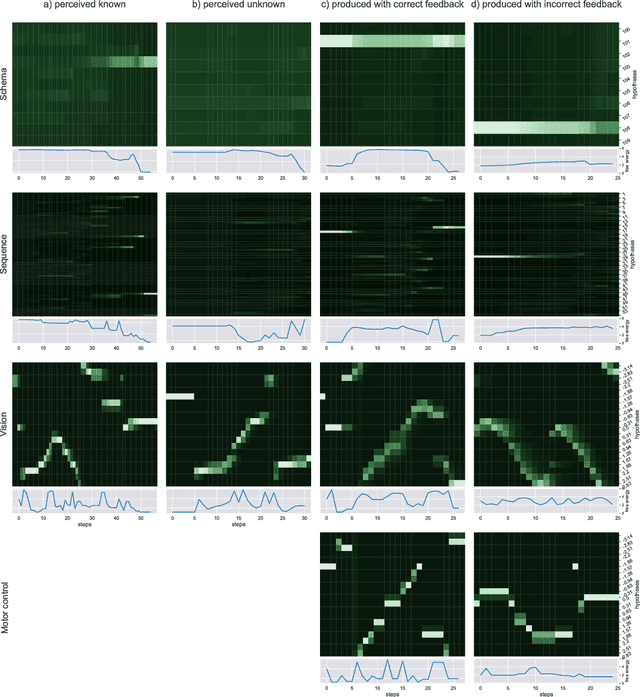
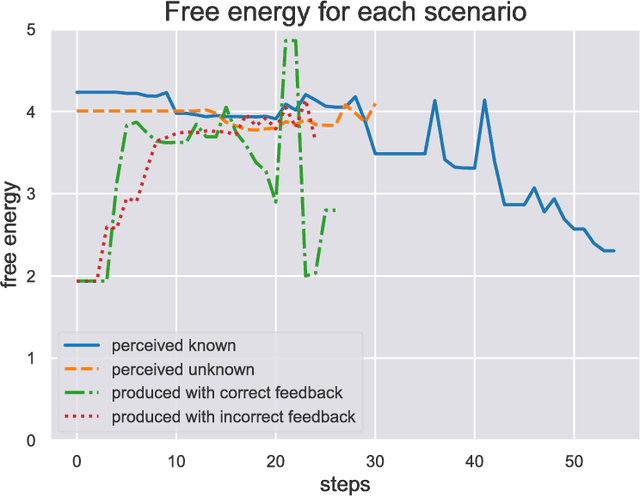
During interaction with others, we perceive and produce social actions in close temporal distance or even simultaneously. It has been argued that the motor system is involved in perception and action, playing a fundamental role in the handling of actions produced by oneself and by others. But how does it distinguish in this processing between self and other, thus contributing to self-other distinction? In this paper we propose a hierarchical model of sensorimotor coordination based on principles of perception-action coupling and predictive processing in which self-other distinction arises during action and perception. For this we draw on mechanisms assumed for the integration of cues for a sense of agency, i.e., the sense that an action is self-generated. We report results from simulations of different scenarios, showing that the model is not only able to minimize free energy during perception and action, but also showing that the model can correctly attribute sense of agency to own actions.