 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Model Development to Identify Failed Healing in Patients after Non-Union Fracture Surgery
Apr 17, 2024Bone non-union is among the most severe complications associated with trauma surgery, occurring in 10-30% of cases after long bone fractures. Treating non-unions requires a high level of surgical expertise and often involves multiple revision surgeries, sometimes even leading to amputation. Thus, more accurate prognosis is crucial for patient well-being. Recent advances in machine learning (ML) hold promise for developing models to predict non-union healing, even when working with smaller datasets, a commonly encountered challenge in clinical domains. To demonstrate the effectiveness of ML in identifying candidates at risk of failed non-union healing, we applied three ML models (logistic regression, support vector machine, and XGBoost) to the clinical dataset TRUFFLE, which includes 797 patients with long bone non-union. The models provided prediction results with 70% sensitivity, and the specificities of 66% (XGBoost), 49% (support vector machine), and 43% (logistic regression). These findings offer valuable clinical insights because they enable early identification of patients at risk of failed non-union healing after the initial surgical revision treatment protocol.
Time Series Classification for Detecting Parkinson's Disease from Wrist Motions
Apr 21, 2023



Parkinson's disease (PD) is a neurodegenerative disease with frequently changing motor symptoms where continuous symptom monitoring enables more targeted treatment. Classical time series classification (TSC) and deep learning techniques have limited performance for PD symptom monitoring using wearable accelerometer data because PD movement patterns are complex, but datasets are small. We investigate InceptionTime and RandOm Convolutional KErnel Transform (ROCKET) because they are state-of-the-art for TSC and promising for PD symptom monitoring: InceptionTime's high learning capacity is suited to modeling complex movement patterns while ROCKET is suited to small datasets. We used a random search to find the highest-scoring InceptionTime architecture and compared it to ROCKET with a ridge classifier and a multi-layer perceptron (MLP) on wrist motions of PD patients. We find that all approaches are suitable for estimating tremor severity and bradykinesia presence but struggle with detecting dyskinesia. ROCKET performs better for dyskinesia, whereas InceptionTime is slightly better for tremor and bradykinesia but has much higher variability in performance. Both outperform the MLP. In conclusion, both InceptionTime and ROCKET are suitable for continuous symptom monitoring, with the choice depending on the symptom of interest and desired robustness.
A Multi-layer Gaussian Process for Motor Symptom Estimation in People with Parkinson's Disease
Sep 27, 2018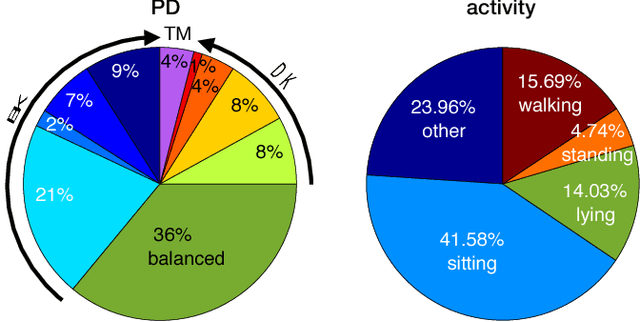
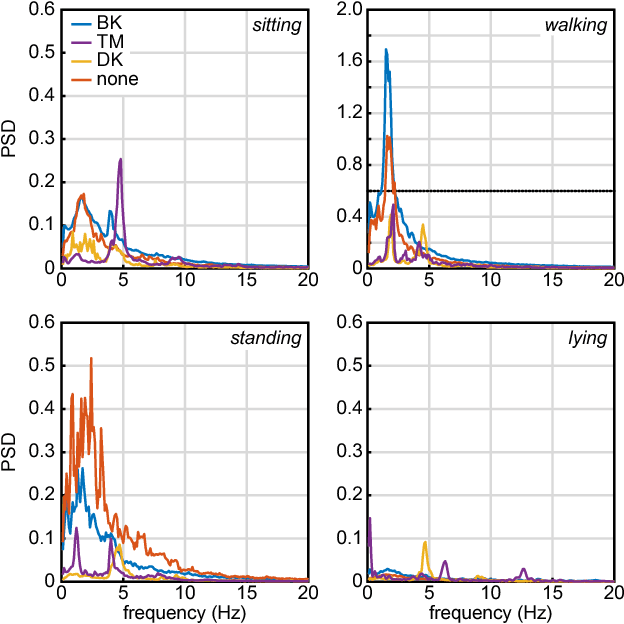
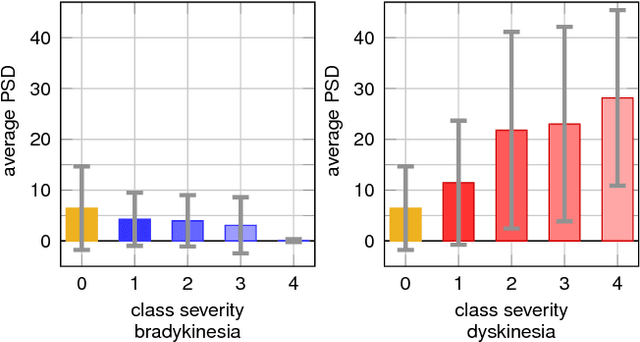
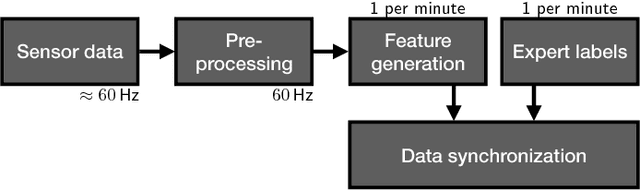
The assessment of Parkinson's disease (PD) poses a significant challenge as it is influenced by various factors which lead to a complex and fluctuating symptom manifestation. Thus, a frequent and objective PD assessment is highly valuable for effective health management of people with Parkinson's disease (PwP). Here, we propose a method for monitoring PwP by stochastically modeling the relationships between their wrist movements during unscripted daily activities and corresponding annotations about clinical displays of movement abnormalities. We approach the estimation of PD motor signs by independently modeling and hierarchically stacking Gaussian process models for three classes of commonly observed movement abnormalities in PwP including tremor, (non-tremulous) bradykinesia, and (non-tremulous) dyskinesia. We use clinically adopted severity measures as annotations for training the models, thus allowing our multi-layer Gaussian process prediction models to estimate not only their presence but also their severities. The experimental validation of our approach demonstrates strong agreement of the model predictions with these PD annotations. Our results show the proposed method produces promising results in objective monitoring of movement abnormalities of PD in the presence of arbitrary and unknown voluntary motions, and makes an important step towards continuous monitoring of PD in the home environment.
Parkinson's Disease Assessment from a Wrist-Worn Wearable Sensor in Free-Living Conditions: Deep Ensemble Learning and Visualization
Aug 08, 2018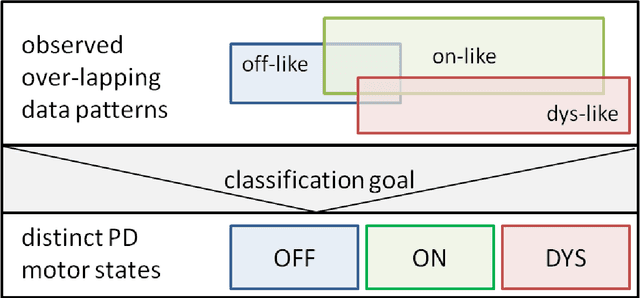
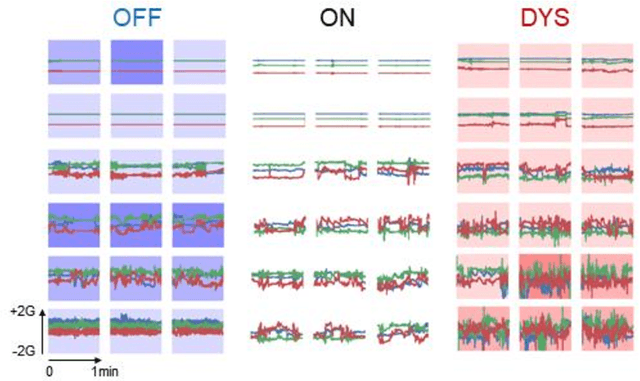
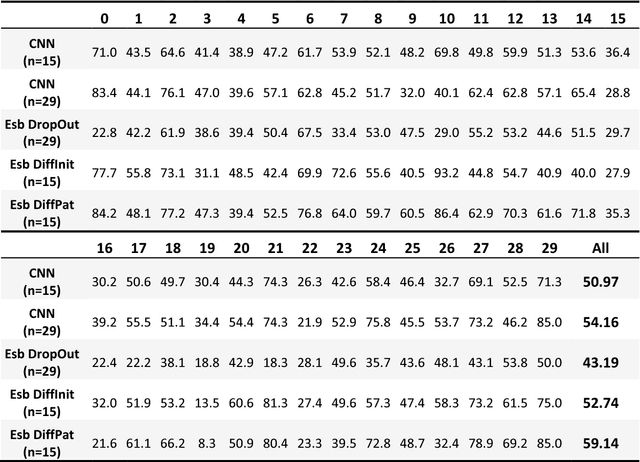
Parkinson's Disease (PD) is characterized by disorders in motor function such as freezing of gait, rest tremor, rigidity, and slowed and hyposcaled movements. Medication with dopaminergic medication may alleviate those motor symptoms, however, side-effects may include uncontrolled movements, known as dyskinesia. In this paper, an automatic PD motor-state assessment in free-living conditions is proposed using an accelerometer in a wrist-worn wearable sensor. In particular, an ensemble of convolutional neural networks (CNNs) is applied to capture the large variability of daily-living activities and overcome the dissimilarity between training and test patients due to the inter-patient variability. In addition, class activation map (CAM), a visualization technique for CNNs, is applied for providing an interpretation of the results.
Data Augmentation of Wearable Sensor Data for Parkinson's Disease Monitoring using Convolutional Neural Networks
Nov 08, 2017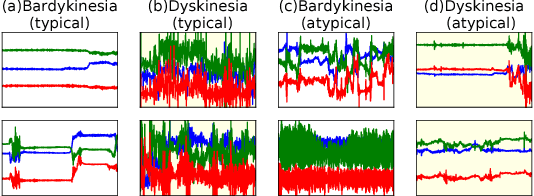
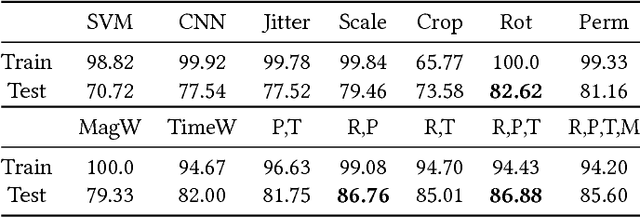

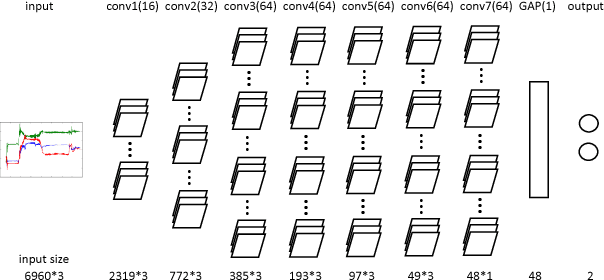
While convolutional neural networks (CNNs) have been successfully applied to many challenging classification applications, they typically require large datasets for training. When the availability of labeled data is limited, data augmentation is a critical preprocessing step for CNNs. However, data augmentation for wearable sensor data has not been deeply investigated yet. In this paper, various data augmentation methods for wearable sensor data are proposed. The proposed methods and CNNs are applied to the classification of the motor state of Parkinson's Disease patients, which is challenging due to small dataset size, noisy labels, and large intra-class variability. Appropriate augmentation improves the classification performance from 77.54\% to 86.88\%.
Object Handover Prediction using Gaussian Processes clustered with Trajectory Classification
Jul 10, 2017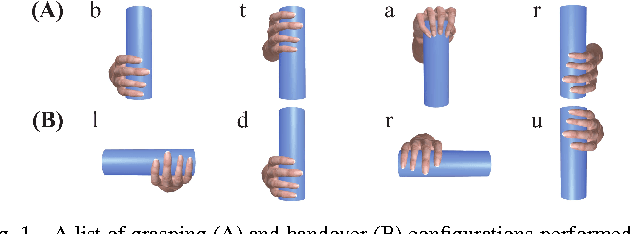
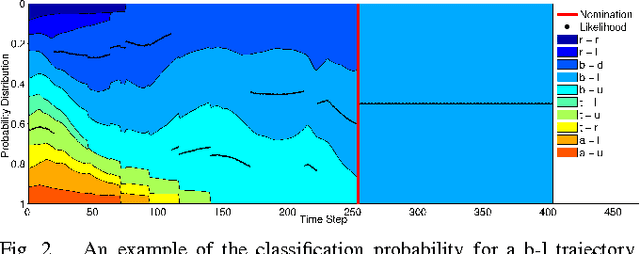
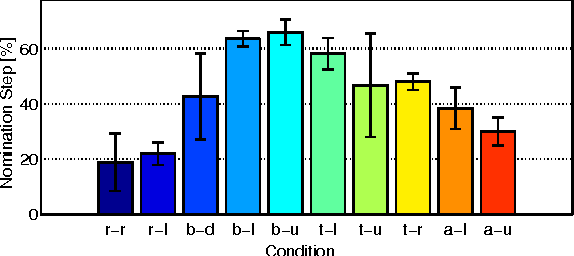
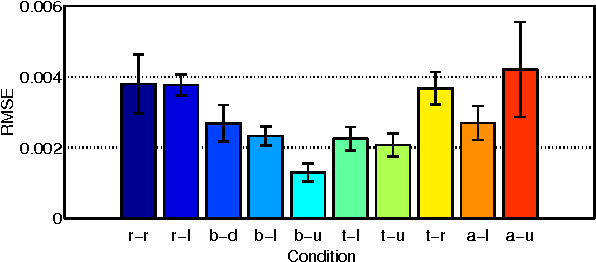
A robotic system which approximates the user intention and appropriate complimentary motion is critical for successful human-robot interaction. %While the existing wearable sensors can monitor human movements in real-time, prediction of human movement is a significant challenge due to its highly non-linear motions optimised through the redundancy in the degrees of freedom. Here, we demonstrate robustness of the Gaussian Process (GP) clustered with a stochastic classification technique for trajectory prediction using an object handover scenario. By parametrising real 6D hand movements during human-human object handover using dual quaternions, variations of handover configurations were classified in real-time and then the remaining hand trajectory was predicted using the GP. The results highlights that our method can classify the handover configuration at an average of $43.4\%$ of the trajectory and the final hand configuration can be predicted within the normal variation of human movement. In conclusion, we demonstrate that GPs combined with a stochastic classification technique is a robust tool for proactively estimating human motions for human-robot interaction.