 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-layer Gaussian Process for Motor Symptom Estimation in People with Parkinson's Disease
Sep 27, 2018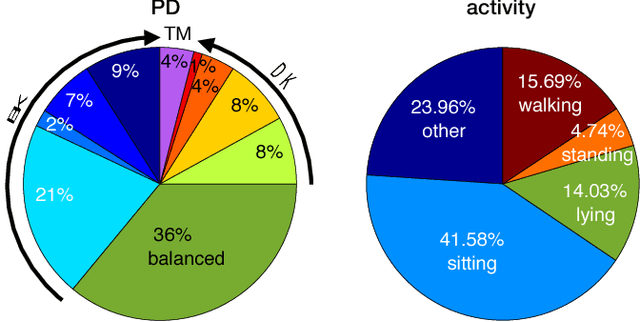
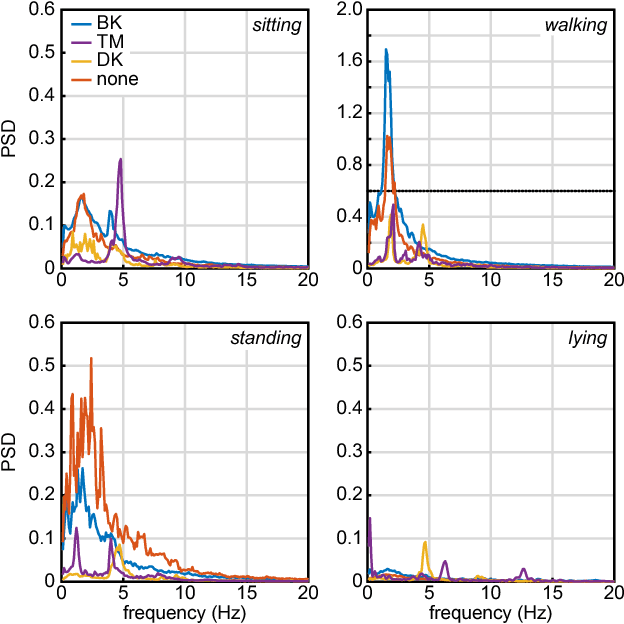
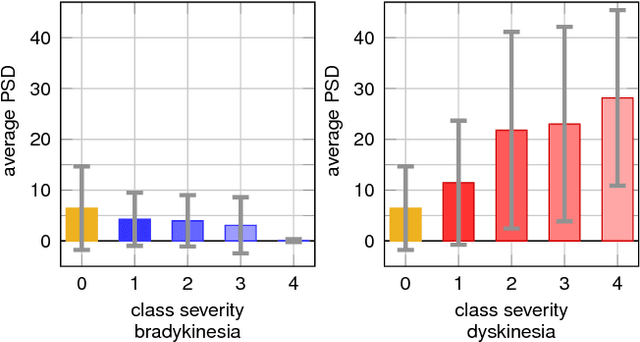
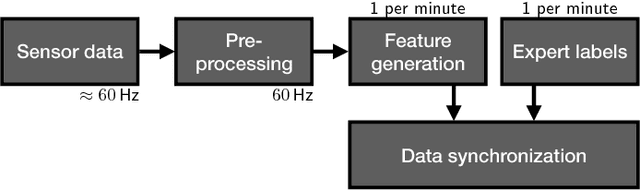
The assessment of Parkinson's disease (PD) poses a significant challenge as it is influenced by various factors which lead to a complex and fluctuating symptom manifestation. Thus, a frequent and objective PD assessment is highly valuable for effective health management of people with Parkinson's disease (PwP). Here, we propose a method for monitoring PwP by stochastically modeling the relationships between their wrist movements during unscripted daily activities and corresponding annotations about clinical displays of movement abnormalities. We approach the estimation of PD motor signs by independently modeling and hierarchically stacking Gaussian process models for three classes of commonly observed movement abnormalities in PwP including tremor, (non-tremulous) bradykinesia, and (non-tremulous) dyskinesia. We use clinically adopted severity measures as annotations for training the models, thus allowing our multi-layer Gaussian process prediction models to estimate not only their presence but also their severities. The experimental validation of our approach demonstrates strong agreement of the model predictions with these PD annotations. Our results show the proposed method produces promising results in objective monitoring of movement abnormalities of PD in the presence of arbitrary and unknown voluntary motions, and makes an important step towards continuous monitoring of PD in the home environment.
Parkinson's Disease Assessment from a Wrist-Worn Wearable Sensor in Free-Living Conditions: Deep Ensemble Learning and Visualization
Aug 08, 2018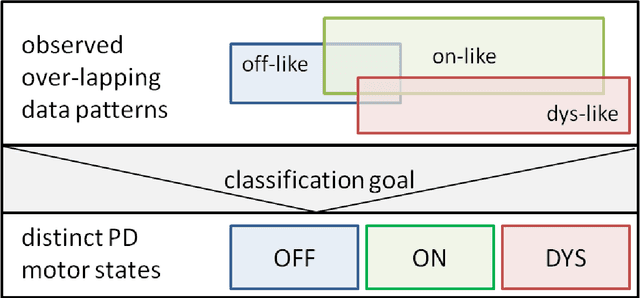
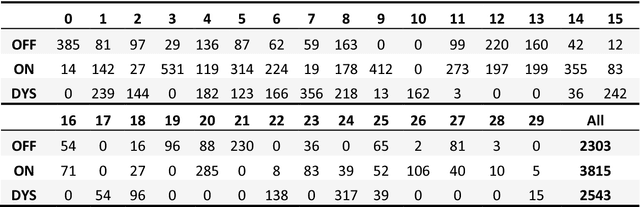
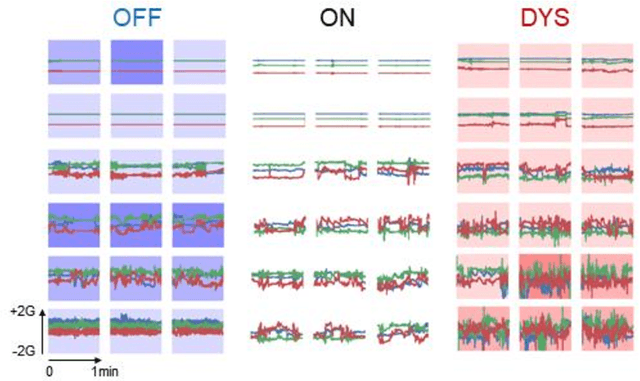
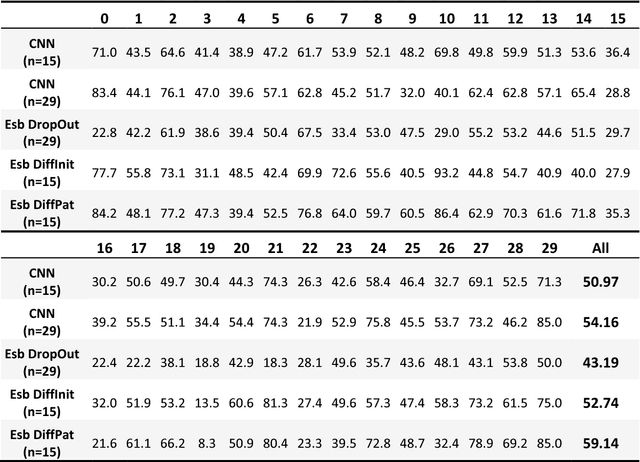
Parkinson's Disease (PD) is characterized by disorders in motor function such as freezing of gait, rest tremor, rigidity, and slowed and hyposcaled movements. Medication with dopaminergic medication may alleviate those motor symptoms, however, side-effects may include uncontrolled movements, known as dyskinesia. In this paper, an automatic PD motor-state assessment in free-living conditions is proposed using an accelerometer in a wrist-worn wearable sensor. In particular, an ensemble of convolutional neural networks (CNNs) is applied to capture the large variability of daily-living activities and overcome the dissimilarity between training and test patients due to the inter-patient variability. In addition, class activation map (CAM), a visualization technique for CNNs, is applied for providing an interpretation of the results.
Data Augmentation of Wearable Sensor Data for Parkinson's Disease Monitoring using Convolutional Neural Networks
Nov 08, 2017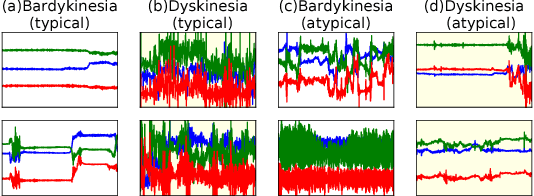
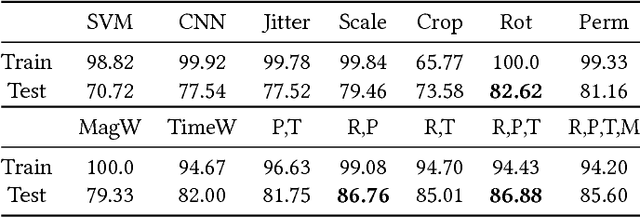

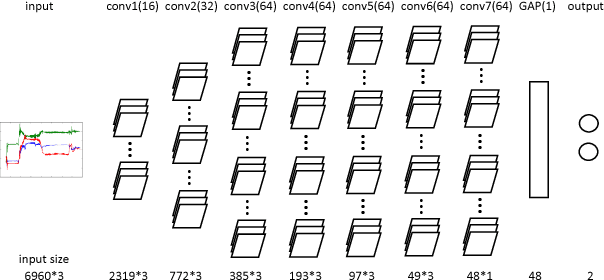
While convolutional neural networks (CNNs) have been successfully applied to many challenging classification applications, they typically require large datasets for training. When the availability of labeled data is limited, data augmentation is a critical preprocessing step for CNNs. However, data augmentation for wearable sensor data has not been deeply investigated yet. In this paper, various data augmentation methods for wearable sensor data are proposed. The proposed methods and CNNs are applied to the classification of the motor state of Parkinson's Disease patients, which is challenging due to small dataset size, noisy labels, and large intra-class variability. Appropriate augmentation improves the classification performance from 77.54\% to 86.88\%.
Object Handover Prediction using Gaussian Processes clustered with Trajectory Classification
Jul 10, 2017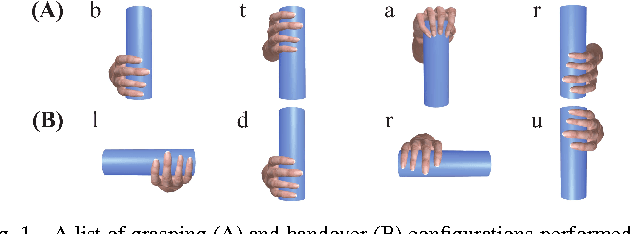
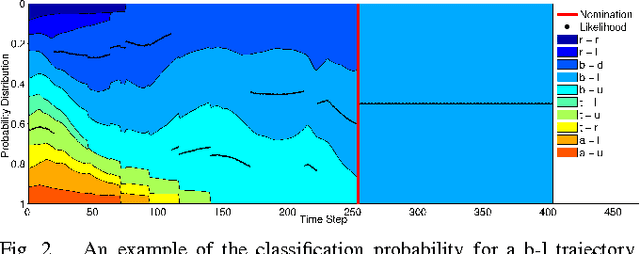
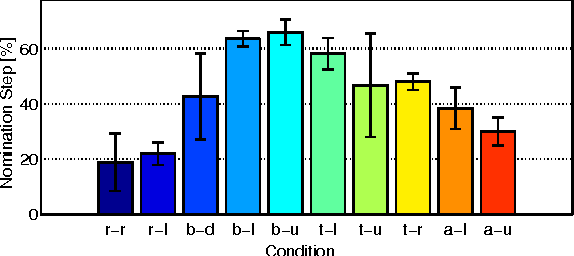
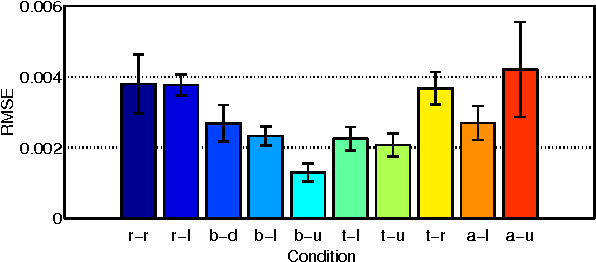
A robotic system which approximates the user intention and appropriate complimentary motion is critical for successful human-robot interaction. %While the existing wearable sensors can monitor human movements in real-time, prediction of human movement is a significant challenge due to its highly non-linear motions optimised through the redundancy in the degrees of freedom. Here, we demonstrate robustness of the Gaussian Process (GP) clustered with a stochastic classification technique for trajectory prediction using an object handover scenario. By parametrising real 6D hand movements during human-human object handover using dual quaternions, variations of handover configurations were classified in real-time and then the remaining hand trajectory was predicted using the GP. The results highlights that our method can classify the handover configuration at an average of $43.4\%$ of the trajectory and the final hand configuration can be predicted within the normal variation of human movement. In conclusion, we demonstrate that GPs combined with a stochastic classification technique is a robust tool for proactively estimating human motions for human-robot interaction.
MPG - A Framework for Reasoning on 6 DOF Pose Uncertainty
Jul 05, 2017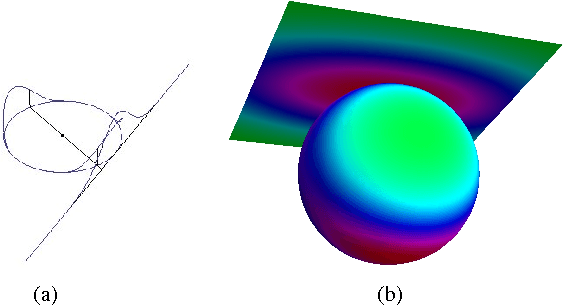
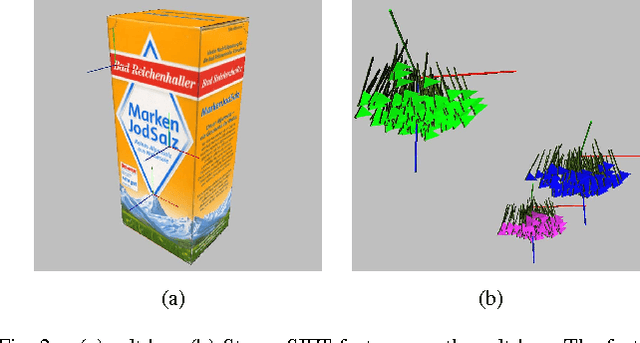
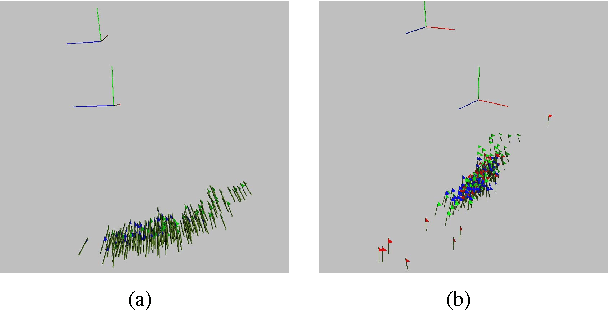
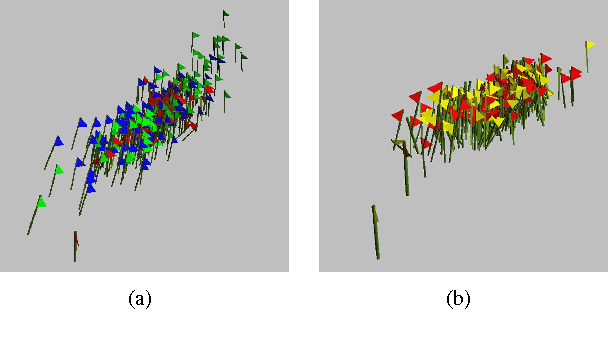
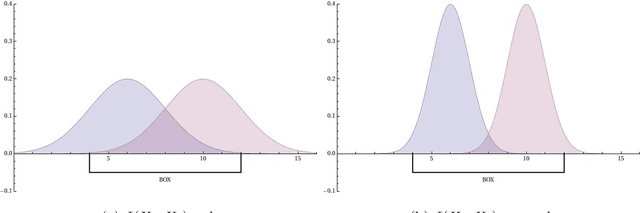
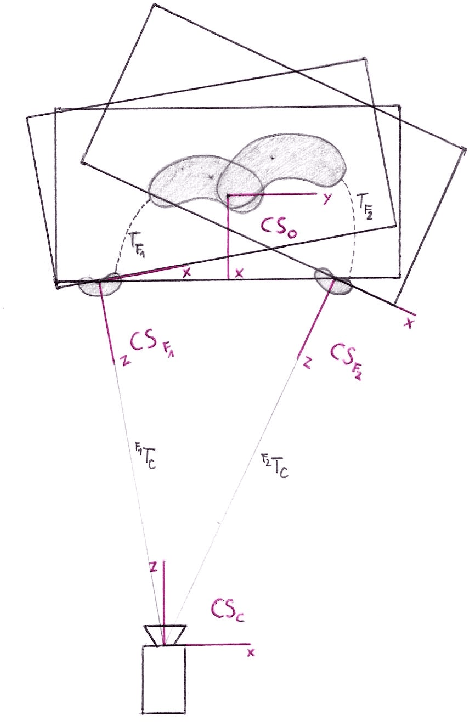
Reasoning about the pose, i.e. position and orientation of objects is one of the cornerstones of robotic manipulation under uncertainty. In a number of joint research projects our group is developing a robotic perception system that perceives and models an unprepared kitchen scenario with many objects. Since no single sensor or measurement provides sufficient information, a technique is needed to fuse a number of uncertain estimates of the pose, i.e. estimates with a widely stretched probability density function ($pdf$). The most frequently used approaches to describe the $pdfs$ are sample based description and multivariate normal (Gaussian) distributions. Sample based descriptions in 6D can describe basically any type of $pdfs$, but they require a large number of samples and there are no analytic formulae to fuse several $pdfs$. For Gaussian distributions these formulae exist, but the Gaussian distributions are unimodal and don't model widely spread distributions well. In this paper we present a framework for probabilistic modeling of 6D poses that combines the expressive power of the sample based description with the conciseness and algorithmic power of the Gaussian models. As parameterization of the 6D poses we select the dual quaternions, i.e. any pose is represented by two quaternions. The orientation part of a pose is described by a unit quaternion. The translation part is described by a purely imaginary quaternion. A basic probability density function over the poses is constructed by selecting a tangent point on the 3D sphere representing unit quaternions and taking the Cartesian set product of the tangent space with the 3D space of translations. In this 6D Euclidean space a 6D Gaussian distribution is defined. Projecting this Gaussian back to the unit sphere and renormalizing induces a distribution over 6D poses, called a Projected Gaussian.
Approximation of probability density functions on the Euclidean group parametrized by dual quaternions
Jun 28, 2017
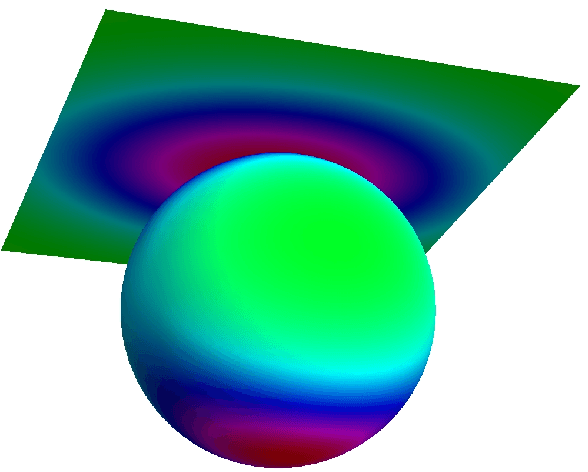
Perception is fundamental to many robot application areas especially in service robotics. Our aim is to perceive and model an unprepared kitchen scenario with many objects. We start with the perception of a single target object. The modeling relies especially on fusing and merging of weak information from the sensors of the robot in order to localize objects. This requires the representation of various probability distributions of pose in $S_3 \times \mathbb{R}^3$ as orientation and position have to be localized. In this thesis I present a framework for probabilistic modeling of poses in $S_3 \times \mathbb{R}^3$ that represents a large class of probability distributions and provides among others the operations of the fusion and the merge of estimates. Further it offers the propagation of uncertain information data. I work out why we choose to represent the orientation part of a pose by a unit quaternion. The translation part is described either by a 3-dimensional vector or by a purely imaginary quaternion. This depends on whether we define the probability density function or whether we want to represent a transformation which consists of a rotation and a translation by a dual quaternion. A basic probability den- sity function over the poses is defined by a tangent point on the hypersphere and a 6-dimensional Gaussian distribution. The hypersphere is embedded to the R4 which is representing a unit quaternions whereas the Gaussian is defined over the product of the tangent space of the sphere and of the space of translations. The projection of this Gaussian to the hypersphere induces a distribution over poses in $S_3 \times \mathbb{R}^3$. The set of mixtures of projected Gaussians can approximate the probability density functions that arise in our application. Moreover it is closed under the operations introduced in this framework and allows for an efficient implementation.