 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust, Compliant Assembly via Optimal Belief Space Planning
Nov 09, 2018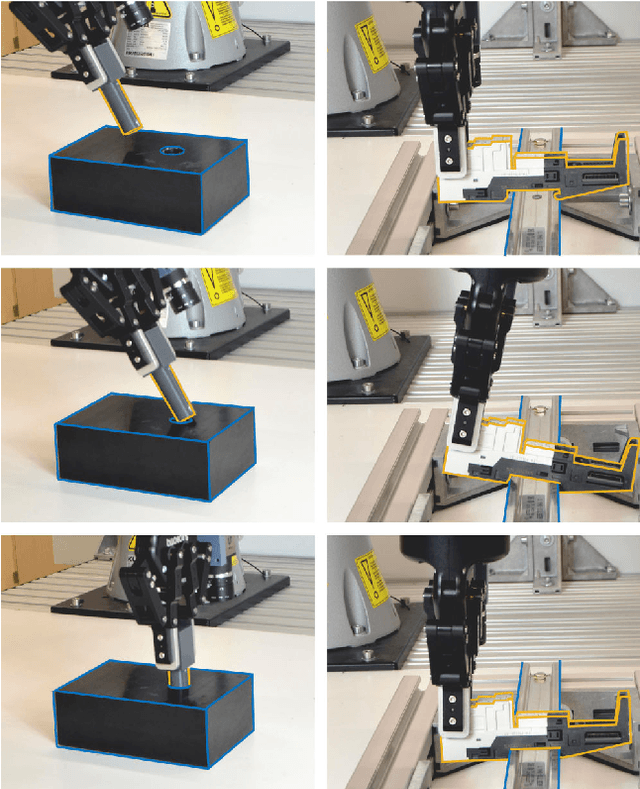
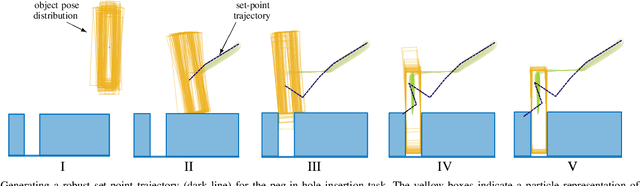


In automated manufacturing, robots must reliably assemble parts of various geometries and low tolerances. Ideally, they plan the required motions autonomously. This poses a substantial challenge due to high-dimensional state spaces and non-linear contact-dynamics. Furthermore, object poses and model parameters, such as friction, are not exactly known and a source of uncertainty. The method proposed in this paper models the task of parts assembly as a belief space planning problem over an underlying impedance-controlled, compliant system. To solve this planning problem we introduce an asymptotically optimal belief space planner by extending an optimal, randomized, kinodynamic motion planner to non-deterministic domains. Under an expansiveness assumption we establish probabilistic completeness and asymptotic optimality. We validate our approach in thorough, simulated and real-world experiments of multiple assembly tasks. The experiments demonstrate our planner's ability to reliably assemble objects, solely based on CAD models as input.
MPG - A Framework for Reasoning on 6 DOF Pose Uncertainty
Jul 05, 2017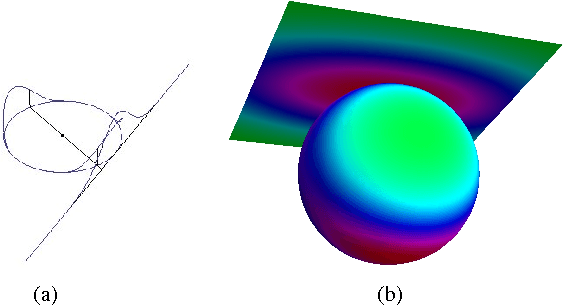
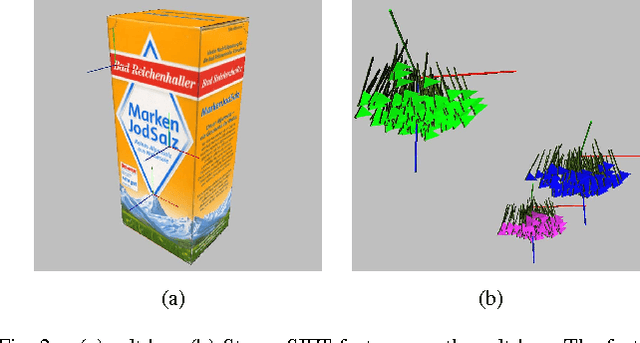
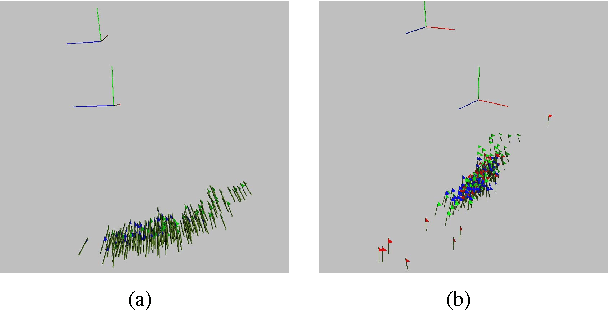
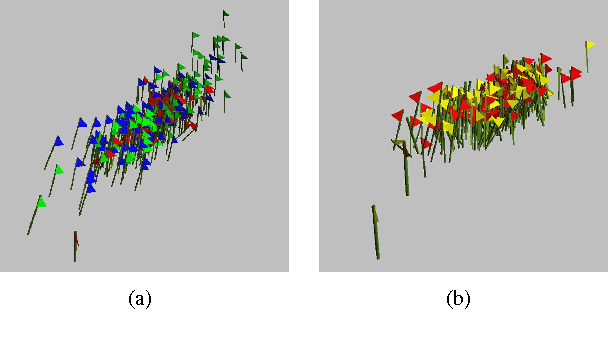
Reasoning about the pose, i.e. position and orientation of objects is one of the cornerstones of robotic manipulation under uncertainty. In a number of joint research projects our group is developing a robotic perception system that perceives and models an unprepared kitchen scenario with many objects. Since no single sensor or measurement provides sufficient information, a technique is needed to fuse a number of uncertain estimates of the pose, i.e. estimates with a widely stretched probability density function ($pdf$). The most frequently used approaches to describe the $pdfs$ are sample based description and multivariate normal (Gaussian) distributions. Sample based descriptions in 6D can describe basically any type of $pdfs$, but they require a large number of samples and there are no analytic formulae to fuse several $pdfs$. For Gaussian distributions these formulae exist, but the Gaussian distributions are unimodal and don't model widely spread distributions well. In this paper we present a framework for probabilistic modeling of 6D poses that combines the expressive power of the sample based description with the conciseness and algorithmic power of the Gaussian models. As parameterization of the 6D poses we select the dual quaternions, i.e. any pose is represented by two quaternions. The orientation part of a pose is described by a unit quaternion. The translation part is described by a purely imaginary quaternion. A basic probability density function over the poses is constructed by selecting a tangent point on the 3D sphere representing unit quaternions and taking the Cartesian set product of the tangent space with the 3D space of translations. In this 6D Euclidean space a 6D Gaussian distribution is defined. Projecting this Gaussian back to the unit sphere and renormalizing induces a distribution over 6D poses, called a Projected Gaussian.