 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximation of probability density functions on the Euclidean group parametrized by dual quaternions
Paper and Code
Jun 28, 2017
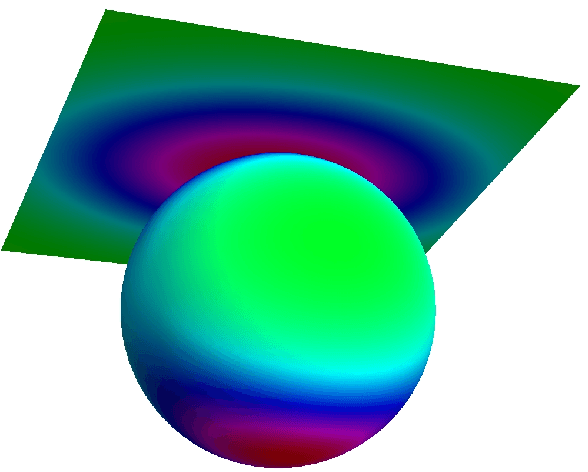
Perception is fundamental to many robot application areas especially in service robotics. Our aim is to perceive and model an unprepared kitchen scenario with many objects. We start with the perception of a single target object. The modeling relies especially on fusing and merging of weak information from the sensors of the robot in order to localize objects. This requires the representation of various probability distributions of pose in $S_3 \times \mathbb{R}^3$ as orientation and position have to be localized. In this thesis I present a framework for probabilistic modeling of poses in $S_3 \times \mathbb{R}^3$ that represents a large class of probability distributions and provides among others the operations of the fusion and the merge of estimates. Further it offers the propagation of uncertain information data. I work out why we choose to represent the orientation part of a pose by a unit quaternion. The translation part is described either by a 3-dimensional vector or by a purely imaginary quaternion. This depends on whether we define the probability density function or whether we want to represent a transformation which consists of a rotation and a translation by a dual quaternion. A basic probability den- sity function over the poses is defined by a tangent point on the hypersphere and a 6-dimensional Gaussian distribution. The hypersphere is embedded to the R4 which is representing a unit quaternions whereas the Gaussian is defined over the product of the tangent space of the sphere and of the space of translations. The projection of this Gaussian to the hypersphere induces a distribution over poses in $S_3 \times \mathbb{R}^3$. The set of mixtures of projected Gaussians can approximate the probability density functions that arise in our application. Moreover it is closed under the operations introduced in this framework and allows for an efficient implementation.