 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrognostic Framework for Robotic Manipulators Operating Under Dynamic Task Severities
Nov 30, 2024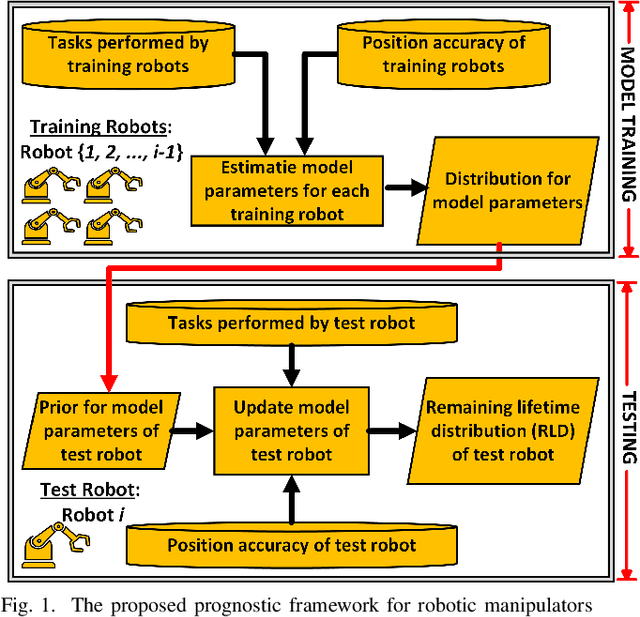
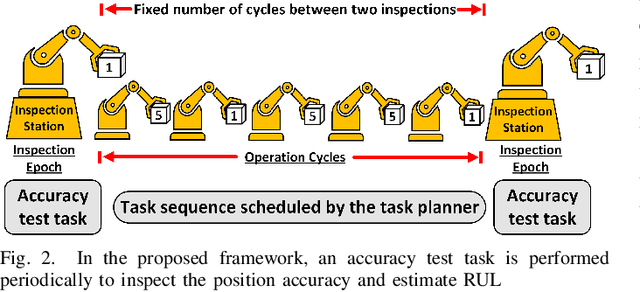
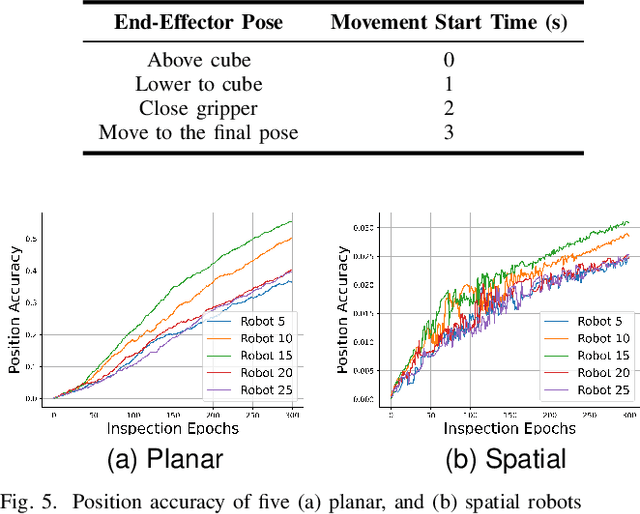
Robotic manipulators are critical in many applications but are known to degrade over time. This degradation is influenced by the nature of the tasks performed by the robot. Tasks with higher severity, such as handling heavy payloads, can accelerate the degradation process. One way this degradation is reflected is in the position accuracy of the robot's end-effector. In this paper, we present a prognostic modeling framework that predicts a robotic manipulator's Remaining Useful Life (RUL) while accounting for the effects of task severity. Our framework represents the robot's position accuracy as a Brownian motion process with a random drift parameter that is influenced by task severity. The dynamic nature of task severity is modeled using a continuous-time Markov chain (CTMC). To evaluate RUL, we discuss two approaches -- (1) a novel closed-form expression for Remaining Lifetime Distribution (RLD), and (2) Monte Carlo simulations, commonly used in prognostics literature. Theoretical results establish the equivalence between these RUL computation approaches. We validate our framework through experiments using two distinct physics-based simulators for planar and spatial robot fleets. Our findings show that robots in both fleets experience shorter RUL when handling a higher proportion of high-severity tasks.
Human Robot Interface for Assistive Grasping
Apr 06, 2018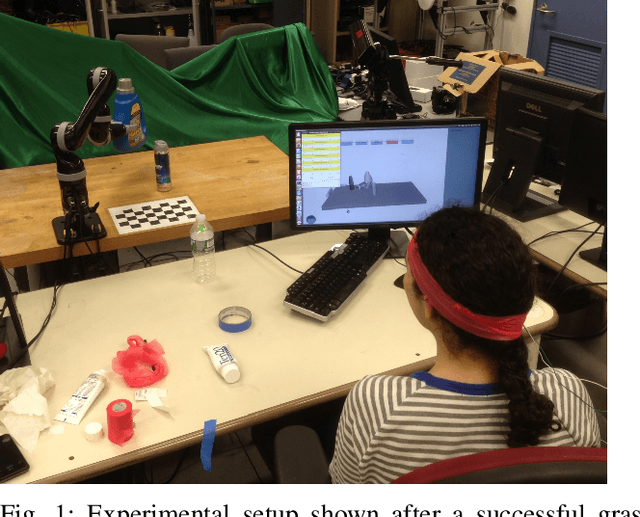
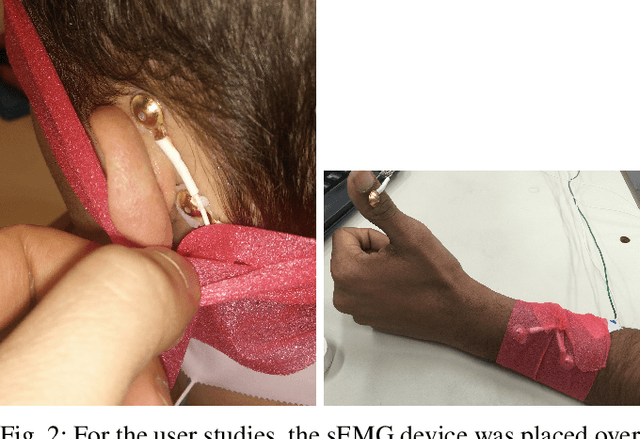
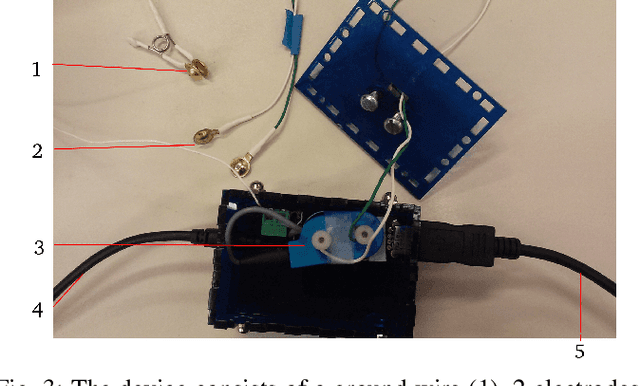
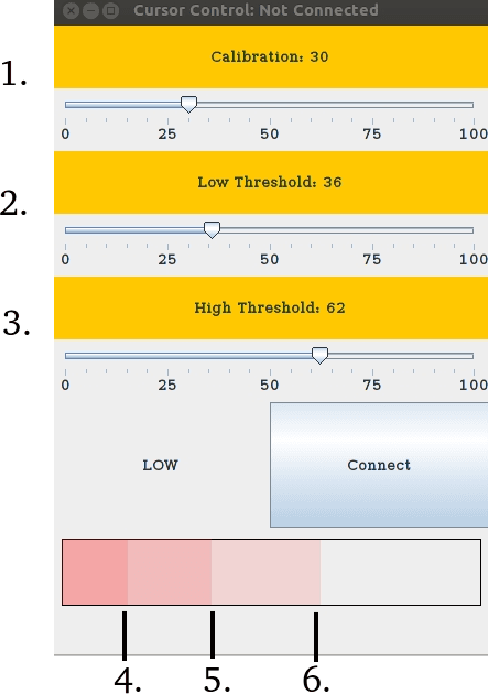
This work describes a new human-in-the-loop (HitL) assistive grasping system for individuals with varying levels of physical capabilities. We investigated the feasibility of using four potential input devices with our assistive grasping system interface, using able-bodied individuals to define a set of quantitative metrics that could be used to assess an assistive grasping system. We then took these measurements and created a generalized benchmark for evaluating the effectiveness of any arbitrary input device into a HitL grasping system. The four input devices were a mouse, a speech recognition device, an assistive switch, and a novel sEMG device developed by our group that was connected either to the forearm or behind the ear of the subject. These preliminary results provide insight into how different interface devices perform for generalized assistive grasping tasks and also highlight the potential of sEMG based control for severely disabled individuals.